Why did I decide to write this post?
Of course, you can see the original instructions for installing ROS Noetic on the ROS Wiki , but everything is in English and is explained very vaguely, but I will try to explain it to you as clearly as possible. So, let's begin.
What is ROS?
ROS - Robot Operating System, a framework for programming robots, providing functionality for distributed work. ROS was originally developed in 2007 under the name switchyard at Stanford University's Artificial Intelligence Lab.
Can ROS Noetic be installed on other Ubuntu versions?
There is no correct answer to this question. It seems that individual Noetic packages can be installed on other versions of the operating system, but their stability is not guaranteed. Therefore, most likely everything is not. So let's get down to the installation itself.
What to do if I am using a different version of Ubuntu
ROS has been developed in different versions that are installed on different versions of Ubuntu.
Ubuntu version |
ROS version |
Ubuntu 15.04 & 16.04 |
Ros kenetic |
Ubuntu 18.04 |
ROS Melodic |
Ubuntu 20.04 |
ROS Noetik |
ROS Ubuntu? ! noetic , ros-noetic
, ros-melodic
.
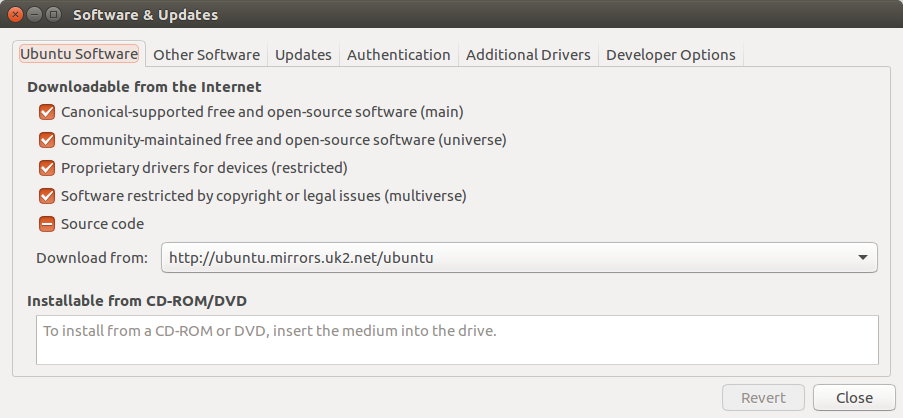
, :
Main - , Canonical.
Universe - , .
Restricted - .
Multiverse - , .
, . " Ubuntu" "Ubuntu Software" ,
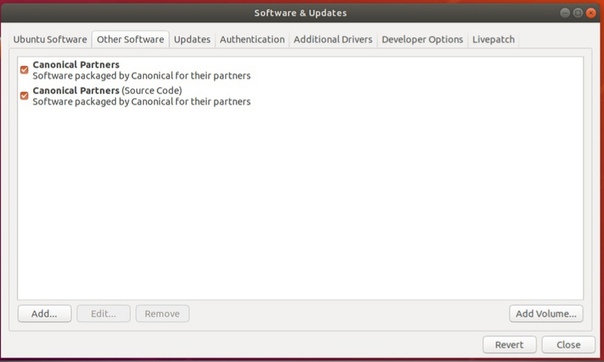
"Other sowtware" Canonical Parthners Canonical Parthners(source code)
ROS
ROS Noetic
1
. packages.ros.org . :
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $ (lsb_release -sc) main"> /etc/apt/sources.list.d/ros-latest.list'
. :
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
curl apt-key, , -:
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
2
-
sudo apt-get update
3
. , ROS :
Desktop Full - , . , : 2D/3D . , :
sudo apt install ros-noetic-desktop-full
2. Desktop Instal - ROS, rqt rviz.
sudo apt install ros-noetic-desktop
3. ROS-Base: (Bare Bones) - ROS. , . :
sudo apt install ros-noetic-ros-base
- ROS :
sudo apt install ros-noetic-_
4
bash, ROS. :
source /opt/ros/noetic/setup.bash
5
, ROS. ROS , . , rosinstall - , ROS . :
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
6
Before you can use many of the ROS tools, you will need to initialize rosdep . It allows you to easily install system dependencies for the source code you want to compile and is required to run some of the core components in ROS. If you haven't installed rosdep yet , then it's time to install it. To do this, write in the terminal:
sudo apt python3-rosdep
Step 7
To initialize rosdep, write in the terminal:
sudo rosdep init
And then we write the following:
rosdep update
TOTAL
Congratulations on installing ROS Noetic. You can now start programming your own robots using ROS.