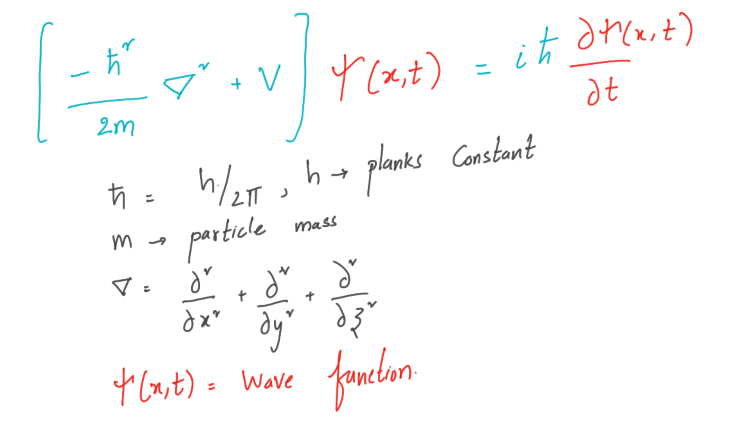
— . , — . , ψ(x, t), , . ψ(x, t), , , , , , .
. , . . .
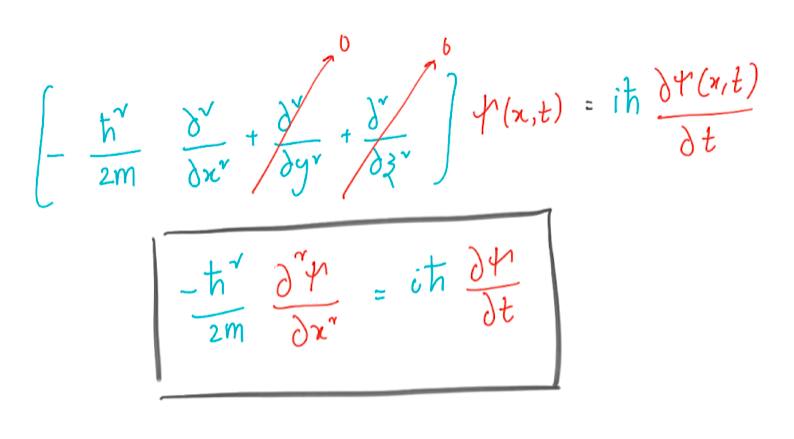
—
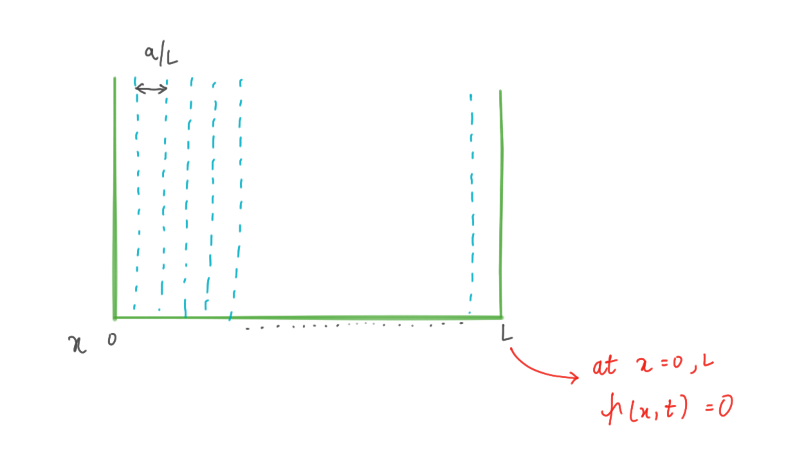
, . , . ? , x=0 x=L. .
. x=0 x=L t ψ(x, t)=0. a, 2a, 3a . ψ(x, t) .
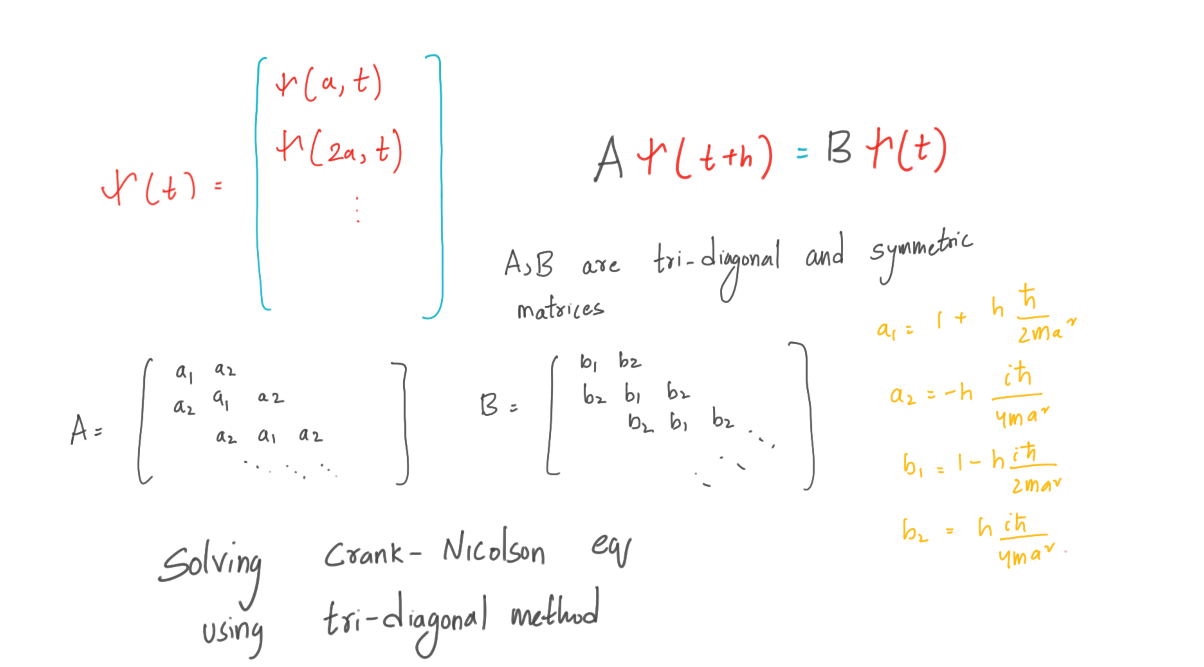
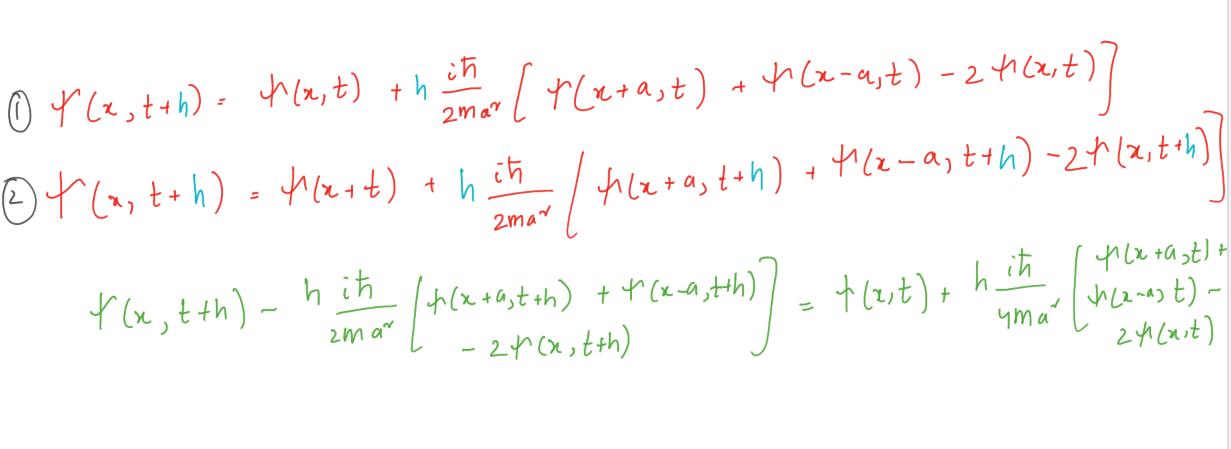
, : Aψ(t + h) = Bψ(t), A B . t = 0, ψ(0). , ψ(h), , ψ(h), ψ(2h) . t = 0 ψ(0) :
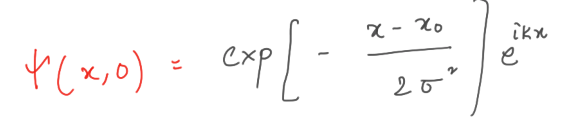
ψ(0) , , , .
, — . ψ(x, t) , ψ(0) (N = 1000) = L/N.
import numpy as np
from pylab import *
from matplotlib import pyplot as plt
from matplotlib import animation
#matplotlib.use('GTK3Agg')
# from matplotlib import interactive
# interactive(True)
########################################Variables######################################################################################################
N_Slices = 1000 #Number of slices in the box
Time_step = 1e-18 #Time step for each iteration
Mass = 9.109e-31 #mass of electron
plank = 1.0546e-36 #Planks constant
L_Box = 1e-9 #Length of the box
Grid = L_Box/N_Slices #Lenght of each slice
#####################################Si(0) using the given equation ###############################################################################
Si_0 = np.zeros(N_Slices+1,complex) #Initiating Si funtion at time step = 0
x = np.linspace(0,L_Box,N_Slices+1)
def G_Equation(x):
x_0 = L_Box/2
Sig = 1e-10
k = 5e10
result = exp(-(x-x_0)**2/2/Sig**2)*exp(1j*k*x) #Given Equation at t = 0
return result
Si_0[:] = G_Equation(x) #Si funtion at time step = 0
#######################################V = Bxsi(0)################################################################################
a_1 = 1 + Time_step*plank*1j/(2*Mass*(Grid**2)) #Diagonal of A Tridiagonal matrix
a_2 = -Time_step*plank*1j/(4*Mass*Grid**2) #Up and Down to A Tridiagonal matrix
b_1 = 1 - Time_step*plank*1j/(2*Mass*(Grid**2)) #Diagonal of B Tridiagonal matrix
b_2 = Time_step*plank*1j/(4*Mass*Grid**2) #Up and Down to B Tridiagonal matrix
BxSi_0 = [] #V = BxSi and si funtion at x = 0
for i in range(1000):
if i == 0:
BxSi_0.append(b_1*Si_0[0] + b_2*(Si_0[1])) #V can be maipulated by the equation in Text book
else:
BxSi_0.append(b_1*Si_0[i] + b_2*(Si_0[i+1] + Si_0[i-1]))
BxSi_0 = np.array(BxSi_0)
#####################################Tri Diagonal matrix algorithm#####################################################################################
def TDMAsolver(a, b, c, d): #Instead of solving using Numpy.linalg, it is prefered to Use
nf = len(d) #Tri Diagonal Matrix algorithm
ac, bc, cc, dc = map(np.array, (a, b, c, d)) # a,b,c's are up,dia,down element in tridiagonl matrix A
for it in range(1, nf): #AX = d
mc = ac[it-1]/bc[it-1]
bc[it] = bc[it] - mc*cc[it-1]
dc[it] = dc[it] - mc*dc[it-1]
xc = bc
xc[-1] = dc[-1]/bc[-1]
for il in range(nf-2, -1, -1):
xc[il] = (dc[il]-cc[il]*xc[il+1])/bc[il]
return xc
global a #A matrix is fixed through out the problem, so it is good to globalize the variables
global b
global c
b = N_Slices*[a_1] #In A matrix, Both Up,Down elements are a_2 and diag matrix is a_1
a = (N_Slices-1)*[a_2]
c = (N_Slices-1)*[a_2]
####################################Si 1st funtion solver####################################################################################
global Si_1 #First si_funtion usinf Axsi(0+h) = BxSi(0)
Si_1 = TDMAsolver(a, b, c, BxSi_0) #This can be solved by TDM(A,BxSi(0))
###################################A funtion which caliculates si at each step#####################################################################################
global Si_sd #AxSi_stepup = BxSi_stepdown
Si_sd = {} #At first Buckting Si_stepdown in to directry which we can using for finding Si_stepup
def sifuntion(i): #In next iteration, Last iteration Si_stepup will be this iteration's Si_stepdown
if i == 0:
Si_sd[0] = Si_1
return Si_1
else:
Si_stepdown = Si_sd[i-1]
V = np.zeros(N_Slices,complex)
V[0] = b_1*Si_stepdown[0] + b_2*(Si_stepdown[1])
V[1:N_Slices-1] = b_1*Si_stepdown[1:N_Slices-1] + b_2*(Si_stepdown[2:N_Slices] + Si_stepdown[0:N_Slices-2])
V[N_Slices-1] = b_1*Si_stepdown[N_Slices-1]+ b_2*(Si_stepdown[N_Slices-2])
Si_stepup = TDMAsolver(a, b, c, V)
Si_sd[i] = Si_stepup
x = Si_stepup.real
return x
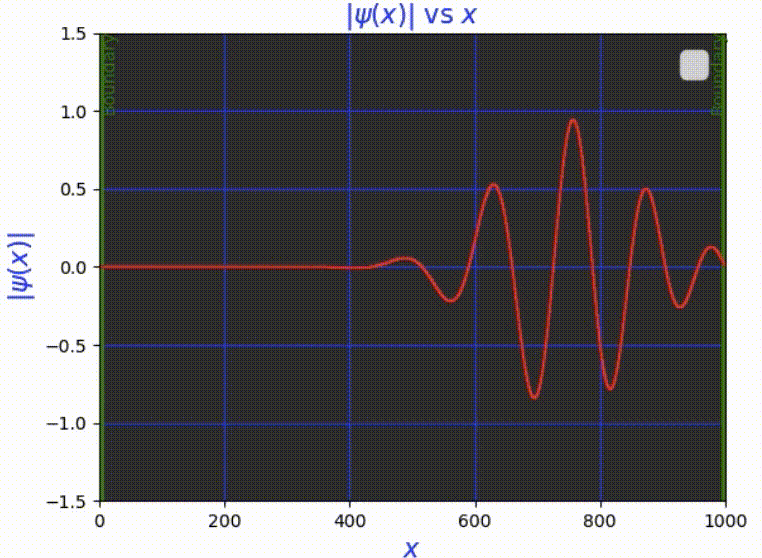
####################################Animating#######################################################################################
fig = plt.figure()
ax = plt.axes(xlim=(0, 1000), ylim=(-1.5, 1.5))
line, = ax.plot([], [], lw=5)
ax.legend(prop=dict(size=20))
ax.set_facecolor('black')
ax.patch.set_alpha(0.8)
ax.set_xlabel('$x$',fontsize = 15,color = 'blue')
ax.set_ylabel(r'$|\psi(x)|$',fontsize = 15,color = 'blue')
ax.grid(color = 'blue')
ax.set_title(r'$|\psi(x)|$ vs $x$', color='blue',fontsize = 15 )
line, = ax.step([], [])
def init():
line.set_data([], [])
return line,
def animate(i):
x = np.linspace(0, 1000, num=1000)
y = sifuntion(i)
line.set_data(x, y)
line.set_color('red')
return line,
anim = animation.FuncAnimation(fig, animate, init_func=init,
frames=10**5, interval=1, blit=True)#5*10**5
plt.vlines(1, -5, 5, linestyles = 'solid', color= 'green',lw=5)
plt.vlines(999, -5, 5, linestyles = 'solid', color= 'green',lw=5)
plt.text(1,1,'Boundary',rotation=90,color= 'green' )
plt.text(975,1,'Boundary',rotation=90,color= 'green' )
plt.figure(figsize=(10,10))
plt.show()
# Writer = animation.writers['ffmpeg']
# writer = Writer()
# anim.save('im.mp4', writer=writer)

, :
Data Scientist
Data Analyst
Data Engineering
Fullstack- Python
Java-
QA- JAVA
Frontend-
C++
Unity
-
iOS-
Android-
Machine Learning
"Machine Learning Deep Learning"
" Data Science"
" Machine Learning Data Science"
"Python -"
" "
DevOps