NASA recently revealed the details of the Ingenuity rover, which landed on the surface of the Red Planet along with the rover. Soon, the rover will try to master the airspace of Mars, but for now, NASA is talking about the details of this journey.
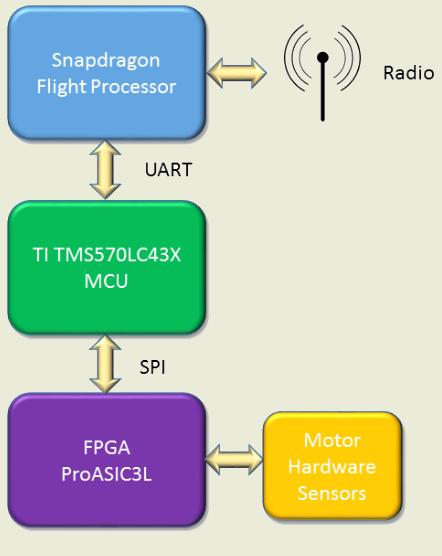
So, the "hardware" of the Marsplane is based on a board with SoC Snapdragon 801 from Qualcomm. Software - Linux and open source. This is the first time Linux-based software is being used on systems sent to Mars, the agency said. The use of open and accessible elements, both hardware and software, allows enthusiasts to repeat the design or make something of their own.
The hardware delivers the high performance that a rover needs. The fact is that normal flight requires operation of the control loop at a frequency of 500 cycles per second, plus image analysis at a frequency of 30 frames per second.
SoC Snapdragon 801 (four cores, 2.26 GHz, 2 GB RAM, 32 GB Flash) is responsible for the operation of the basic system environment based on Linux. It is it that performs high-level operations, including:
• Visual navigation based on the analysis of images from the camera.
• Data management.
• Command processing.
• Formation of telemetry.
• Maintaining a wireless channel.
Through the UART interface, the processor is connected to two microcontrollers, these are MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 KB RAM, 4 MB Flash, UART, SPI, GPIO. They are responsible for various flight control functions. In addition, they are also used for redundancy in case of failure, so that the information that comes to them is duplicated.
Only one of the microcontrollers is involved, but if something goes wrong, then the second comes into operation, which is able to immediately intercept the main functions, replacing the problematic "colleague". Well, FPGA MicroSemi ProASIC3L is responsible for the transfer of information from sensors to microcontrollers, as well as for interaction with the actuators that control the blades of the rotary-wing flyer. It also switches to a spare microcontroller in case of failure.
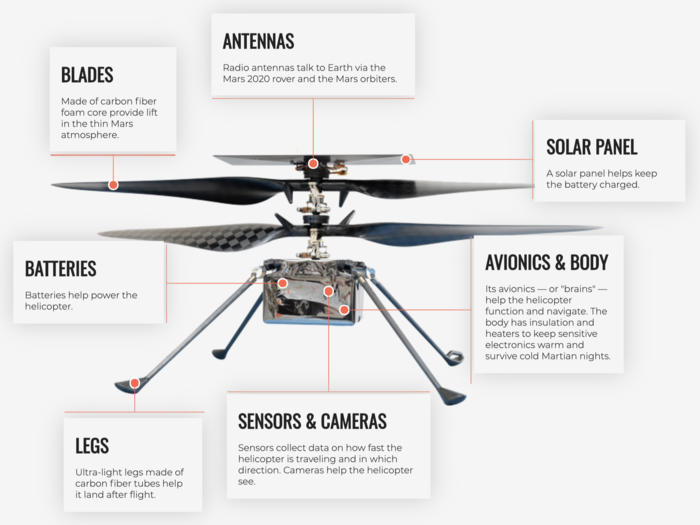
In our previous article, it was said that there is no scientific equipment in this device. But, of course, this is not just a flying blank. The Mars spacecraft is equipped with a laser altimeter from SparkFun Electronics. She specializes in the development of open source software, in addition, she is also one of the founders of the very term OSHW, Open-source hardware. In addition, the rover is equipped with components such as a gyro stabilizer (IMU) and video cameras.
There are two cameras. One of them, VGA, is used as a navigation device, it is responsible for determining the position, direction of movement and speed through frame-by-frame comparison. But the second camera, color, 13 MP, will be used to photograph the area. Aerial photography on Mars - we live in the future!
Most of the systems of the rocket were developed by NASA specialists, namely in the NASA JPL (Jet Propulsion Laboratory) laboratory. At the same time, the components used in the design are not unique, but typical, they are created specifically for small and ultra-small artificial earth satellites (cubsats) and have been developing for several years as part of the open platform F Prime (F´), distributed under the Apache 2.0 license.
F Prime provides the ability to rapidly design and deploy flight control systems and related software elements. In doing so, the flight software is split into separate components with well-defined programming interfaces. In addition, developers get at their disposal a C ++ framework for processing message queues, organizing multithreading, plus modeling tools that allow you to link components and automatically generate code.
And what will a Mars spacecraft do on Mars?
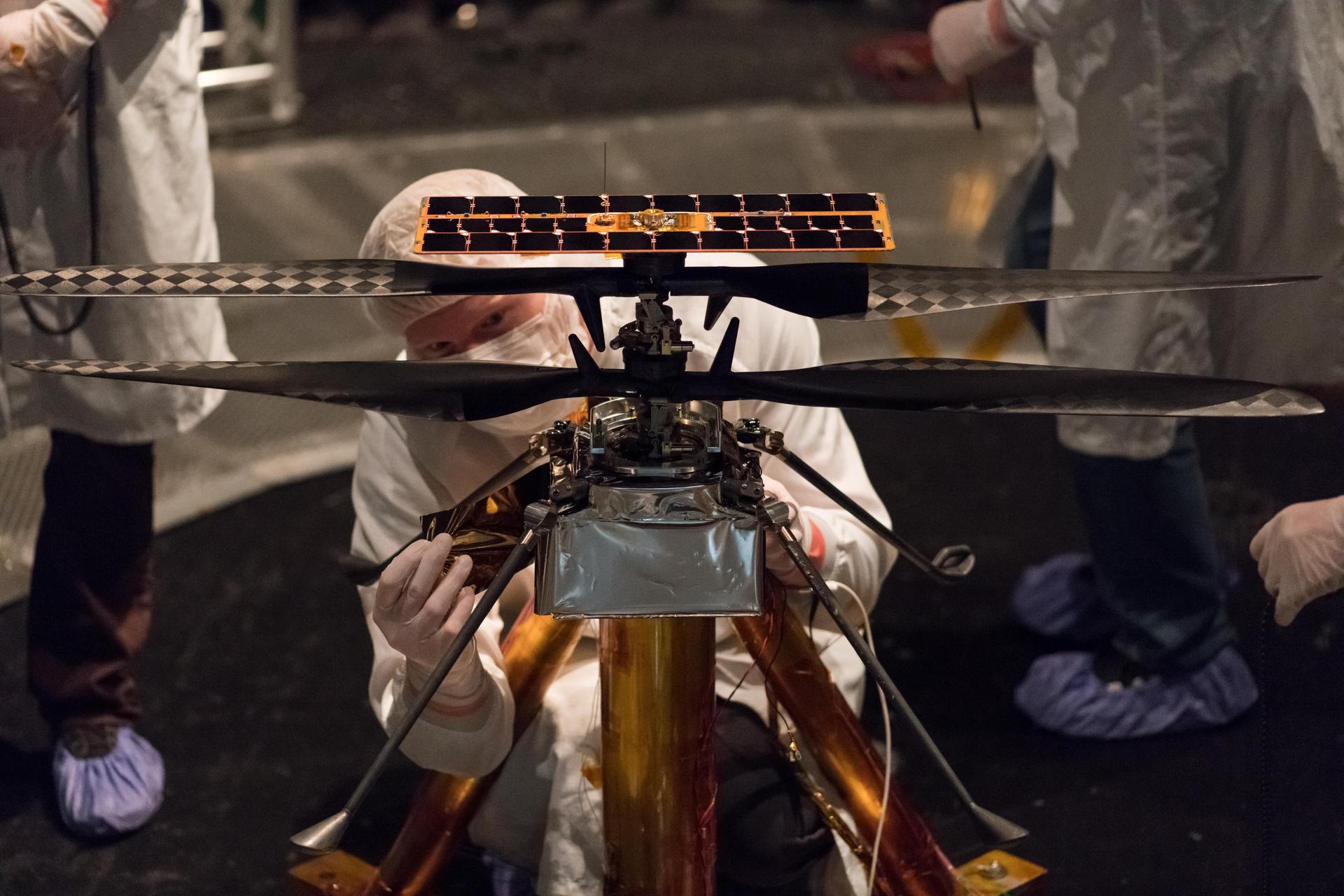
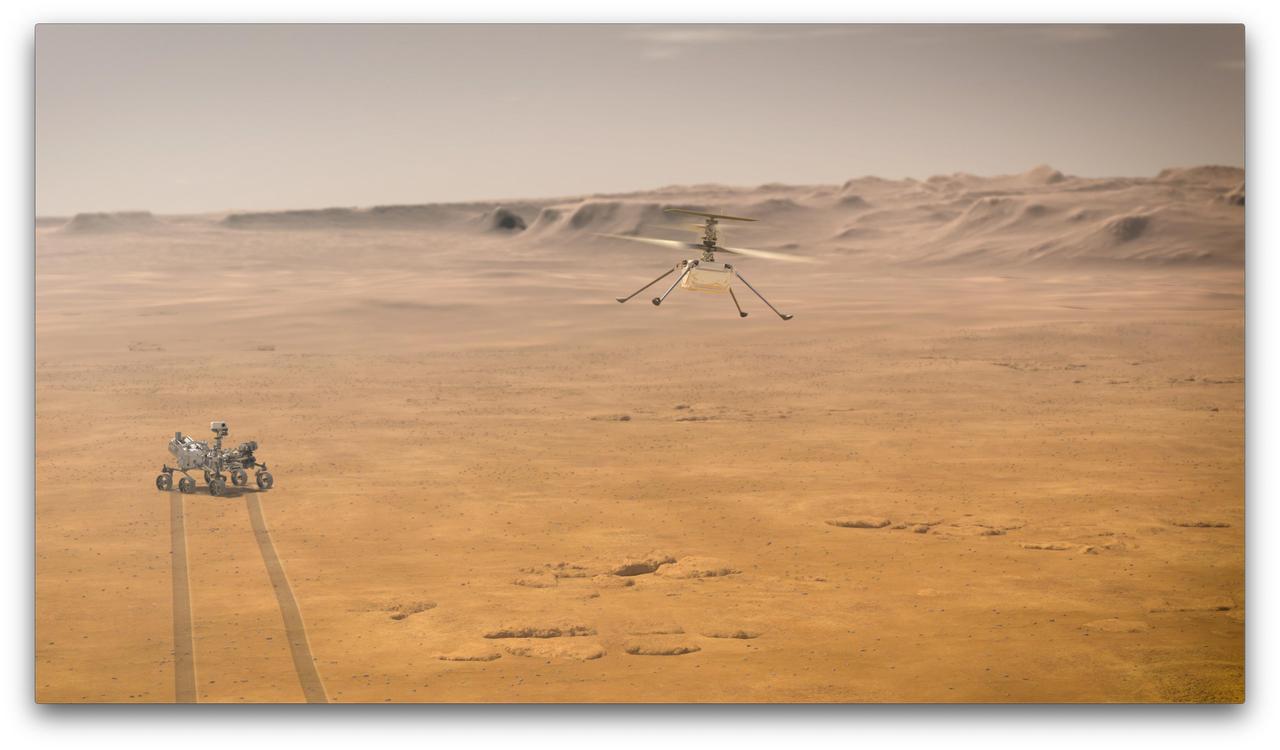
In short, it will take off, fly along a certain route and dock - and all this without human intervention, in a fully automatic mode. The weight of the copter is 1.8 kg, it is very light, it will be guided in flight by two 1.2 m long propellers made of carbon fiber.
There will be several flights, the duration of each is 90 seconds. The spacecraft is located at a distance of about 10 light minutes from Earth, so there is simply no way to control it, no matter how much the engineers want. All three flights will be carried out in one place - the drone will land at the same point all three times. NASA has about a month to work with the drone, so if everything goes smoothly, it can make another flight and land, for the fourth time, in a new location. For the first time, the drone will simply take off and land - it's simple. And then, if everything works out, they can drive him in a circle, try to fly higher and perform a few more "exotic", according to the engineers, maneuvers.
Why only 30 days? Because a drone is a proof of concept of take-off and landing technology. Even if everything goes as well as possible, scientists will leave the rover and take up the rover - the resources of the project are limited.
As mentioned earlier, the main task of the drone is to prove the very possibility of flying in a rarefied Martian atmosphere (only 1% of the density of the Earth's) and the effectiveness of the chosen technology. Of course, the system was tested on Earth, but field tests were always the final stage. Well, now the test site is 10 light minutes from Earth, what can you do.

The Mars Spaceship From Below
If the Mars spacecraft takes off, it will take several pictures, which will already have scientific value - it will not be possible to make photos from Mars orbit in this resolution. NASA, if all goes well, will be able to send an already large rover to Mars, which will be able to cover the distances that the rover now travels in days, in a matter of minutes.
