A little over a year ago, I was lucky to become part of the team of scientists and engineers responsible for operating the Curiosity rover. Since then, I've learned a LOT about rovers. But more remains to be seen. Spirit, Opportunity, Curiosity and Perseverance are some of the most sophisticated yet reliable robots ever created by man. At the same time, the tools and methods that are used to control rovers are quite easy to learn and understandable. And this is good, because on February 18, Perservance will descend to the surface of Mars, after which it will be sent to study the planet. Now my task is to tell you about how to control the rover. When the new rover arrives on Mars, you will already understand what is happening and how it all works.
Much of this article is a summary of my experiences with Curiosity. Keep in mind that Spirit and Opportunity are in many ways similar to their "heir" in this regard. The same technologies and methods will be used to manage Perservance, so there is no overly significant difference.
The basics
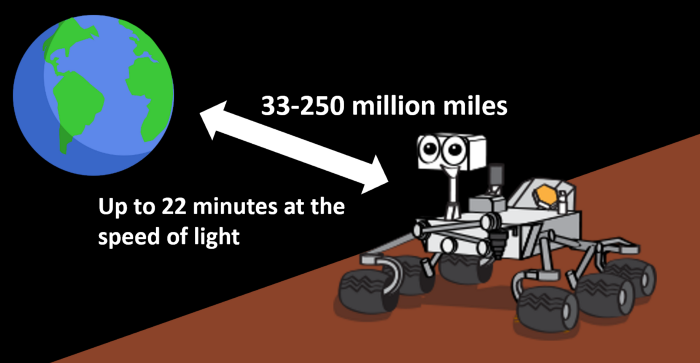
The main thing to know is that Mars is very, very far from us. A radio signal sent from Earth reaches the surface of Mars in 22 minutes. Therefore, real-time control is not an option. In addition, Curiosity receives information from Earth once a day. The rest of the time he is on his own. At the same time, we are not talking about any autonomy: the rover has a limited set of actions that it can perform independently. Most of what the rover does is planned and written in the device's memory back on Earth.
Of course, there are a couple of exceptions: the rover must be able to solve some problems on its own. But most of these decisions "are stopping and waiting for instructions from the Earth in response to some external factor. Aegis has a certain degree of autonomy - a system that can independently select a piece of rock into which Curiosity should "shoot" with a laser.
Watch your step
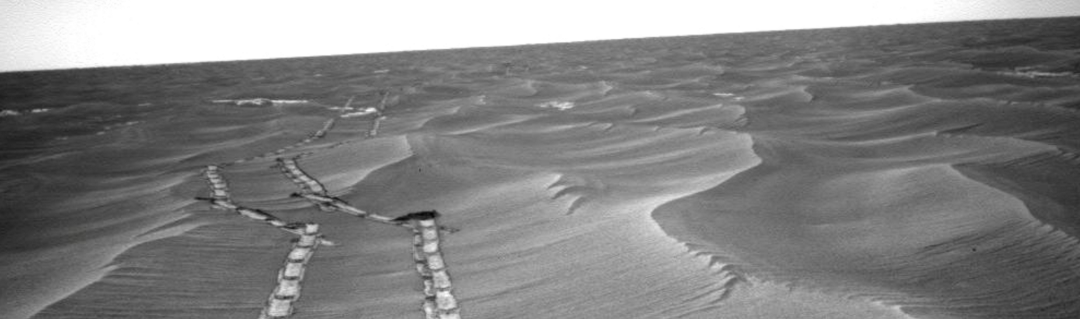
The main task of the rover operator is to ensure its safety throughout the entire journey on Mars. Therefore, you must carefully evaluate all possible options for your actions. NASA's rovers have several cameras, thanks to which the rover forms a "picture", as if seen with human eyes. There are also hazcams, “hazard cameras,” which assess for problems in the vicinity, and navcams, which are navigation cameras that assess the road ahead. There are also other cameras, which, however, are mostly used for scientific tasks, so I will refrain from describing how they work.

In most cases, navcams are used to visually assess the rover track section. The images they receive can be viewed as a three-dimensional "picture" on Earth. NASA has developed specialized software that is designed to visualize the area around the rover and to create a virtual model of the rover and the area around it. This virtual model is used to test operator-planned actions. If the emulation went well, the commands can be sent to Mars. Thus, scientists spare themselves the possible negative consequences of sending an unverified team.
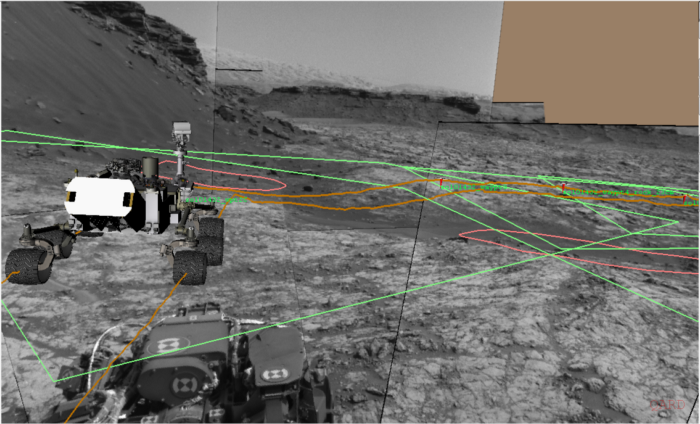
This is what the simulated rover movement looks like after the model is completely ready. The gray areas are the section of Mars that the rover will travel through in the near future. The orange-brown lines are, in fact, the path of the rover. About 30 meters of the surface are modeled per day, the cameras simply cannot collect more information, so the rover travels that much.
And here is the superposition of the simulated rover path on the real images obtained by navigation cameras.
When planning the movement of the rover, there are several important points to consider. For example, the size of objects encountered along the way. The maximum size that the rover can handle is about 50 cm. Anything larger should be rounded. Sand (it's not exactly sand, but let's call it that) is also desirable to bend around: if there is a lot of it, the rover can get stuck. Even small pieces of rock are hazardous as their sharp edges will damage the rover wheels.
Fast, slow or slow?
After scientists have decided on the direction of movement, you need to understand exactly how to move. There are three modes: blind mode, visual odometry and autonav.
Blind mode is the easiest movement possible. In this case, the rover will follow the instructions sent from the Earth, and not pay attention to anything. Ideally, this is a great method of navigating a rover, but conditions on Mars are far from ideal. Often external factors influence the progress towards the goal. This can be, for example, sliding wheels on the surface, so that the rover, instead of moving 10 meters, moves 9 or even 5.
A great way to understand what blind steering is is to close your eyes and try to follow a certain path. For example, 7 meters forward, then turn 30 degrees to the left and walk another 4 meters. In this case, we have no idea what is happening around, and we do not adapt to changing conditions.
In general, blind steering is not the best option, but it allows the rover to move quickly, since the system does not need to stop in order to take pictures. At maximum speed, the rover can travel the length of a football field in just an hour. But this option is chosen only if there are no potentially dangerous objects around.
Visual odometryused by operators more often. In this case, the rover stops every meter in order to take a picture of the ground with cameras. The on-board computer then evaluates the image, compares it to the previous one, and tries to understand what has changed around, including the location of the rover. The computer then sends new navigation commands to keep you on track.
This method is similar to the previous one, only in the process of advancing every couple of steps you need to stop to open your eyes and look around.
Visual odometry is a balance between speed and movement accuracy. This method is extremely important as it helps to detect obstacles in the path of the rover and avoid them.
Auto navigation, or autonav, is the most technologically advanced method. It can be compared to using a drone in a car. We set a common goal and the rover itself searches for a safe and fast path to the goal. The rover has to stop every meter to assess the situation using cameras. But instead of taking a single shot with navigation cameras, the rover uses hazcams as well. Then the on-board computer combines all this information, forming a "hazard map". Problematic places are marked in red, places where the situation is not so dire are in yellow, and the area most suitable for promoting the router is marked in green.

This is the slowest progression option for a rover. If in an ideal situation the rover can walk the length of a football field using the blind method, as mentioned above (this is about 100 m), then in the case of autonomous mode, in ideal conditions, the rover will travel only 30 meters.
At the same time, the rover does not know how to detect sand or sharp stones, so the method is used only when the area is absolutely safe.
What can you expect from Perseverance?
NASA expects the new rover to land on the planet's surface as early as February 18. After that, I hope he will start moving on Mars. Everything I said above applies to the new rover, but it has more capabilities. For example, he will be able to move at least twice as fast as Curiosity: the onboard PC has more computing resources and improved data processing algorithms. The robot's navigation cameras are colored, they receive images of a higher resolution than Curiosity. In addition, the rover has thicker wheels than its predecessor and has a different tread pattern. Scientists believe the wheels will be less damaged.
One of the most important tasks for the rover: collecting and storing samples for return to Earth. A lot depends on the success of this mission. And now, when the rover begins to move, you will understand what and how it provides this movement.
Note: Evan Hilgemann is a mechanical engineer at NASA's Jet Propulsion Laboratory (JPL).
