
“Basically, our work is about how to design spontaneous switching behavior using chaotic dynamics,” says co-author Kohei Nakajima, an applied mathematician at the University of Tokyo in Japan. Typically, engineers design a robot that will walk and run, and the experimenter could then use an external handheld controller to switch these "behaviors." But in order to leap from such a controlled environment to one in which the robot can autonomously switch behavior, the researchers sought to simulate chaotic movement. Often seen in the brains of animals and other dynamic systems, chaotic routing occurs when a system unpredictably but deterministically switches between several stereotypical patterns, be it walking, running, or any other form of behavior.

Past experiences
Robotics have sought to mimic chaotic movement in the past, says lead author Katsuma Inoue, a graduate student at the University of Tokyo. One robot, created in 2006, modeled a human infant with a somatosensory system and hundreds of motors representing the muscles of the body, each connected to several chaotic oscillators - the crude equivalent of motor neurons. Somatosensory systems interact with chaotic oscillators, which then signal the "muscles" to move. Designed to mimic the early development of human motor skills, the system reproduced chaotic-like movements by alternating several stereotyped behaviors, including crawling and rolling over.
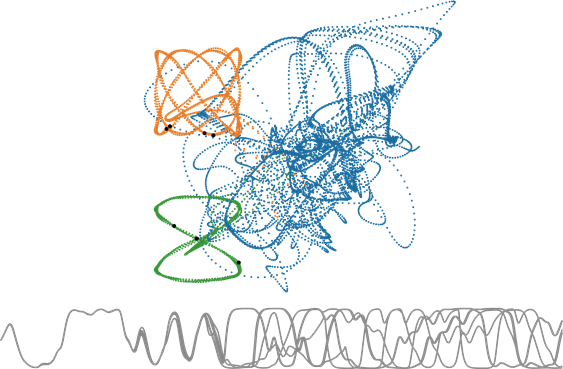
The blue, orange, and green shapes in this image represent various behaviors that the authors designed for their robot brain to switch between autonomously. To do this, researchers have created features of a phenomenon called chaotic movement. Image from the talk "Designing spontaneous behavioral switching via chaotic itinerancy" (Katsuma Inoue, Kohei Nakajima and Yasuo Kuniyoshi).
Other research has focused on developing spontaneous switching behavior in robots using a hierarchical structure with a higher-level neural network driving lower-level modules that correspond to each type of behavior. However, according to Kohei Nakajima, the learning process takes a lot of time in these experiments.
How is the system unique?
To overcome these problems, Japanese researchers did not use hierarchical design. Instead, in a three-step method using a machine learning framework, the researchers first identified several possible behaviors and trained the neural network to reproduce them according to commands. The researchers then trained the network to switch between these behaviors in a specific order, and finally developed probabilistic transitions between these behaviors using chaotic dynamics. The result was a system with features of chaotic movement.

(A) , . : - (ESN) ESN. ESN ESN, , ESN . ESN - , ESN ESN , 0. (B) . . , . , , CI. , . 1 , . 2 3 . 2 3.
What will happen next?
The key idea of the research is to create a simpler and more elegant way of realizing spontaneous locomotion, similar to that of animals. However, the implementation of this study has so far been limited to a neural network on a computer. Researchers now plan to move from computers to physical robots in the hope of finally creating machines that behave autonomously and spontaneously.
A distinctive feature of the human brain, the plasticity of the mind allows people to acquire new knowledge without destroying old memories. Scientists see this research as a step towards creating a synthetic brain that can have a memory that can interact with the environment through an artificial body.
List of references:
- Adam Smith. AI with “spontaneous” behaviour like animals developed [ ]. URL: www.independent.co.uk/life-style/gadgets-and-tech/scientists-ai-spontaneous-behaviour-animals-b1762407.html
- Amy MacDermott. New technique builds animal brain–like spontaneity into AI [ ]. URL: blog.pnas.org/2020/11/new-technique-builds-animal-brain-like-spontaneity-into-ai
- : Katsuma Inoue, Kohei Nakajima, Yasuo Kuniyoshi. Designing spontaneous behavioral switching via chaotic itinerancy [ ]. URL: advances.sciencemag.org/content/advances/6/46/eabb3989.full.pdf