After watching videos on Youtube and on my children drooling, I decided to try my hand at self-assembly of this device on rented gyro scooters. Arguing about the expediency of making it yourself or buying it, I convinced myself that this is a toy, and a seasonal one, and for my children, the weather cannot do with one device. Also, the experience of assembling a home CNC machine played a role in self-belief, and the popularity of the hoverboard trend itself and the wow effect on the people around me played a role.
Experience in assembling a gyroscooter on your own
Getting to work, I decided to first test the concept and determine the required power of electromechanical units in order to justify further investments in components.
The first version (segway)
From a mechanical point of view, the segway version seemed simpler (there is no loaded middle swivel unit), in addition, everything that I found on youtube is homemade segway.
Despite the fact that I have sufficient experience in programming and working with controllers, I decided not to write the software myself, but to find the most ready-made solutions. In addition, I can rarely maintain my motivation for more than one month, and debugging software with electromechanical nodes rarely ends in an absolute victory, more often in a compromise, and the thought that perfection had not been achieved would worm me.
As a result, the choice fell on the work of Ovaltine's Segway Clone (the source is on GitHub). This project seemed to me to be the most mature and supporting hardware I have (Arduino, MPU-6050, motor drivers with 2 and 3 control signals per channel). The project is comprehensively commented, which allows not to go deep into the analysis of nuances and, as a result, not to guess about the shortcomings.
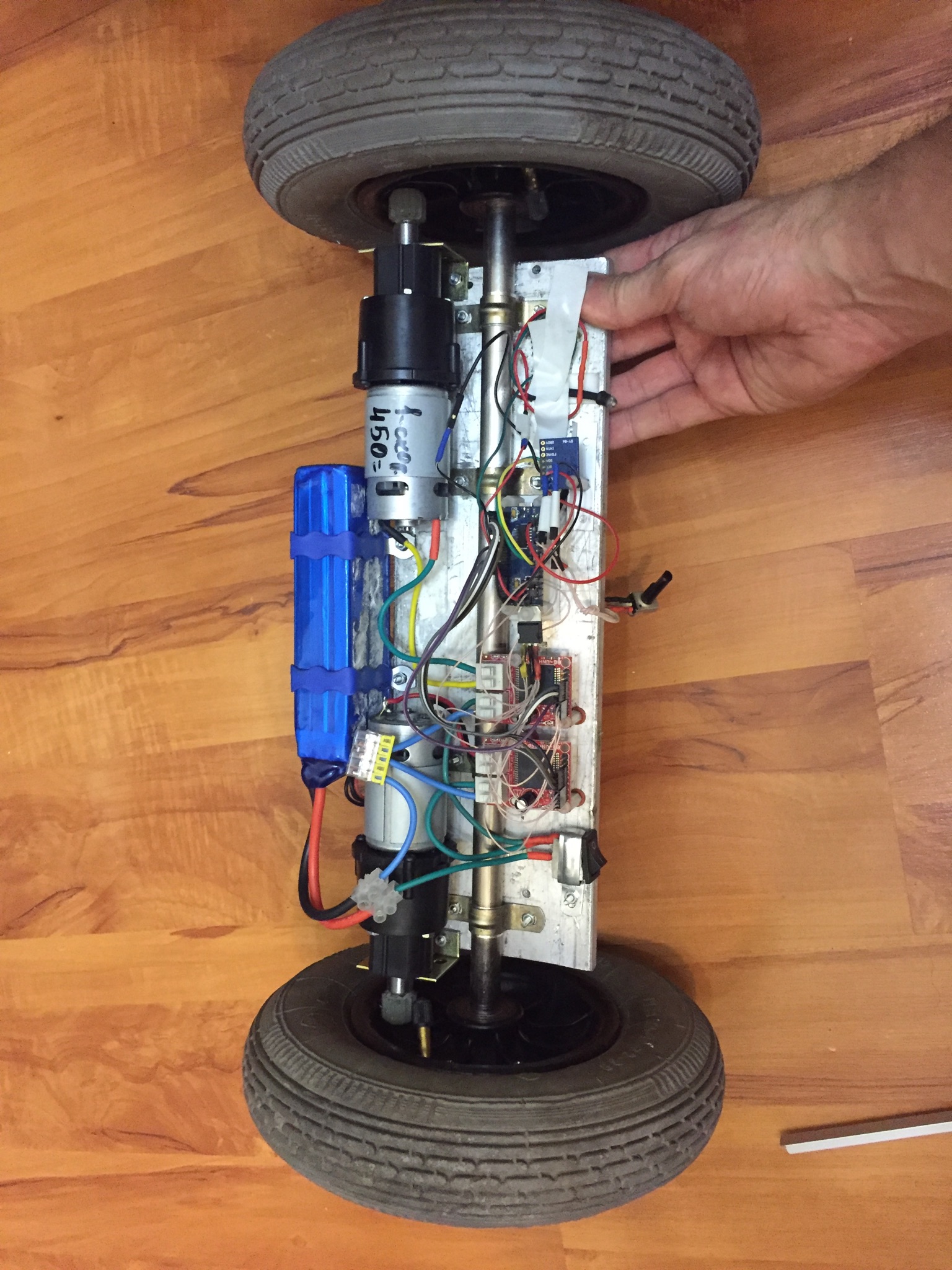
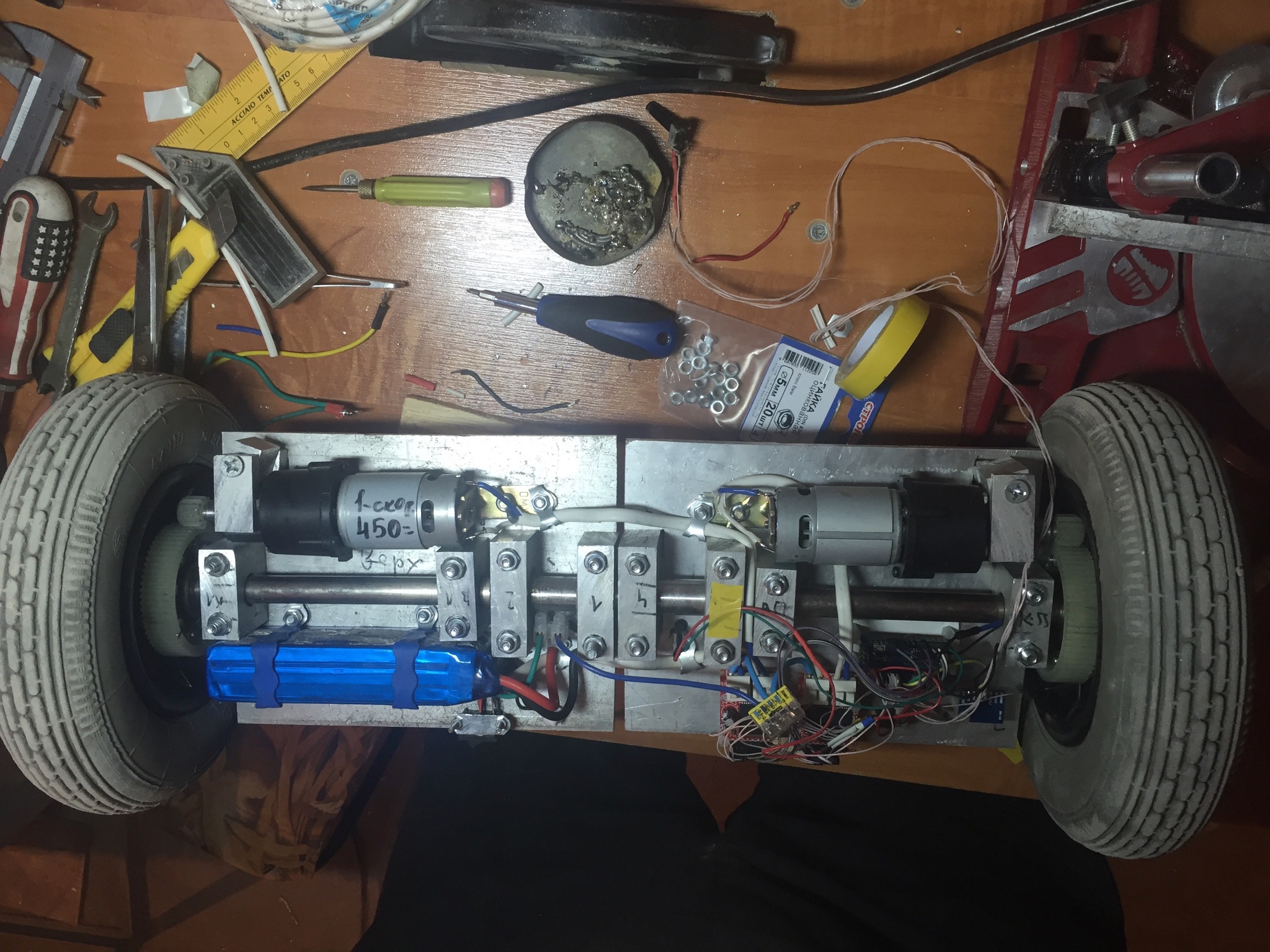
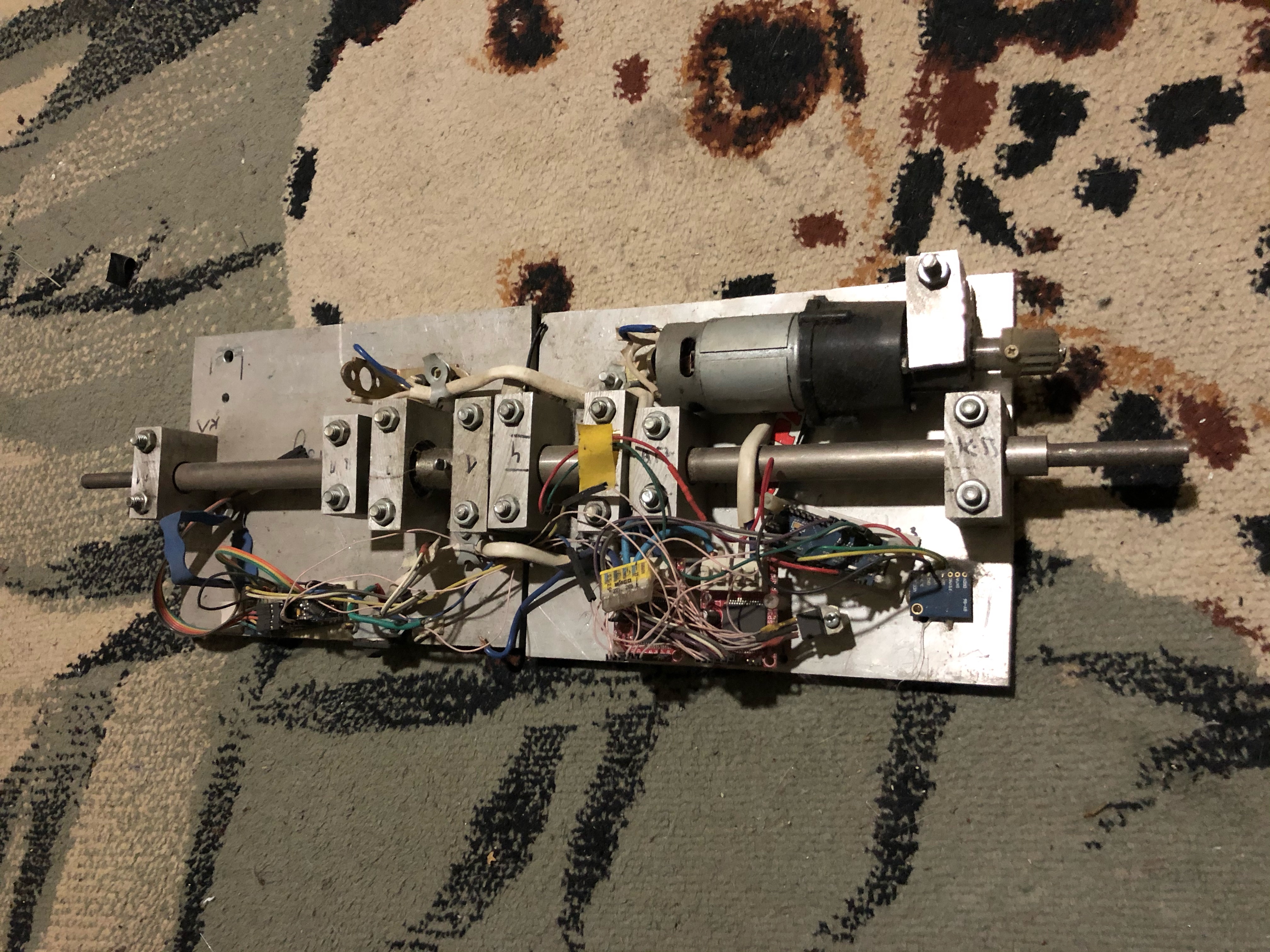
After a short delay, the test platform was slapped:
Aluminum plate thickness 12mm
Axle with a diameter of 14mm - guide from the dot matrix printer
Construction staples diameter 14mm
Wheels - wheelchair front (8 "diameter, bearings are embedded).
Motors and planetary gearboxes from 18V screwdrivers
Gears of transmission on wheels from electric meat grinders
Battery 12V 5Ah Li-pol (left after the downturn of the quadcopter construction trend)
Vhn3sp30 driver
Arduino Nano
10DOF MPU-6050 ( )
,
, .1,3,4,5,6,11 .
, , , (450 , 500 ). ? , .
( 30). vnh2SP30 eBay 600, , vnh3SP30 « » (, ) .
. , , , .
: 0,5 . ( ). – . , , . 20 .
, « – » . 5:1. 1:25. 12 8 ( 5-8/). .
! vnh2 14.
.
, . , , , , , , .
()
, , , « ». , . 6 ( 12) ( 80).
, (). , .
( 17 23). , . . ( , , ). , .. (.. ).
, ( ). , , , .
: , . 16 , ( ) . . (6 .) , , .
22,5. , .
. . « ». . - . .

, , . , . ,
( \; __)
+5 : =5 =5. -5 (.. ) =5-(-5)=10; =5+(-5)=0. - .
( __; )
0 () : =0 =0. +5 ( ) =0+(-5)=-5; =5-(-5)=5. – .
( )
, ( ).
, Arduino . analogRead ( ), .. .
.
, , . «» ( ) . .
, , ( 3 ), . .. , . , .

, .
(204) . , . , , 5 . .
, , .
, . , . ( 1,5-3 - ) . , ( ). - 135…125.
– . , , «» .
5 . .
...
... and invaluable experience of getting off the couch motivation!
That's all. All good!