Link to the original source - there is more order with the design, especially for videos.
Content
- Introduction
- Mechanical impedance control: concepts
- Dynamics model
- Impedance control in generalized coordinates
- Impedance control in Cartesian coordinates
- Gravity compensation
- Visco-elastic hinges
- Conclusion
Es ist noch kein Meister vom Himmel gefallen,
or
Not gods burn pots
Proverb
Introduction
(Robotics and Mechatronics Center, RMC) . : Robotik und Mechatronik Zentrum ( , RMC) Deutsches Zentrum für Luft- und Raumfahrt ( , DLR).
DLR RMC , , , Boston Dynamics, . , , , - . , , RMC . , RMC , . , .
(impedance control).
, , . , , . , , . - , , .
:
, . , [1], , , RMC .
, — impedance control. . , — , . , — !
[2], , – . , . .. «» «» , , () .
LBR iiwa. compliance (), impedance. , ,
, MIT [3]. , , , . , , , ( ). , . , , . , :
, , (
, . , , : (impedance) (admittance). : . , , , — . , , , , — . , . , , .. .
, ( ) , ( ) , , ( ).
, : , . , , , , , ( — ). , , .., , . , - , , .. . , .
, . . - , .
!
, , , , DLR RMC.
[4] , q:
 (1)
(1)
, , - , , .
— , , - τ / - τext / . (.. -) , .. .
— , «» . — M(q) - ( ). , , .. , , , , (.. ). , — - g(q) , , () q.
, , , . , .
LWR III
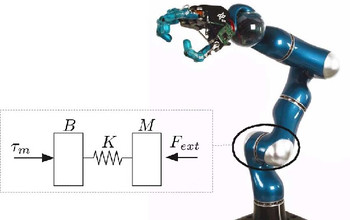
, . , RMC , . B , M — , K — . τm, Fext ( ). :
 , (2)
, (2)
θ — .
: τm ( — ), τ . «» , «» ( ), .. θ q:
 (3)
(3)
(2) (3), (1), . , , , , .. (, ).
.. , . , , Kθ Dθ . τ ( ), .

« — — »
, . « — — », :

θd — () , (θd – θ) . , , , . () .
, , , , PD- .
:
 (4)
(4)
«» ( , ). , . , , , «» . , , , , τm :
 , (5)
, (5)
Bθ — , I — ( - ). (5) (2), :
 (6)
(6)
, , , (6) (5) (2) , Bθ u.
. (4) , , (1), (6), (3), (5) . .
:
(I)
:
(II)
:
(III)
, . , (II), (III), Kθ Dθ, , θd. , .
, (, ) . , - — x(q), J(q) — — x(θ), J(θ):
 ,
, 
 ,
, 
(6), u (4) , , , (τK) (τD). [5],
 ,
,
(4) , :
 ,
,
:
 , (7)
, (7)
Kx Dx — ,

— - xd. , x(θ) , :

, (I), (II), (III) (III) (IV), (7):
(IV)
Kx Dx, - xd .
. , . , ( ), . RMC , .
- : Justin
, , «» , , θ0, q0 (, ) :

g(q0) — - , , q0 — . (1). g(q) . , .
ug (4), (7) u:
 ,
,
 ,
,

, , ug θ.
LBR iiwa
, , :
:
(I)
:
(II)
:
 (V)
(V)
:
 (VI)
(VI)
(, )
-
, , , :

, ? . . τa. - τ. ? , . B M K? D. , :

τK, (3), «» ,
 ,
,
τD ( ) — ,

τ = τK, , :
 ,
,
,
(I) [6]:
 (VII)
(VII)

, , , .
Justin. « » — : «»; «»
Boston Dynamics : «» «», — «». , . , , .
. , . 2016 . [7]. , , . — !
«»
-
, !
, RMC [8]. David, , . , .
David: ESπ- (ESP-) —
, , RMC. , . , , ( ). , - ( ) , !
- ↑., : A Passivity Based Cartesian Impedance Controller for Flexible Joint Robots — Part I: Torque Feedback and Gravity Compensation,
On the Passivity-Based Impedance Control of Flexible Joint Robots,
A Unified Passivity-based Control Framework for Position, Torque and Impedance Control of Flexible Joint Robots
. - ↑Impedance control — Wikipedia
- ↑N. Hogan. Impedance Control: An Approach to Manipulation: Part 1 — Theory, Part II — Implementation, Part III — Applications
- ↑., : , . . . . — .: , 1990. — 526 .: . ISBN 5-03-001375-X ( 5)
- ↑. [3]
- ↑ , , (VII) :


. .
, - . - ↑Implementation of impedance trajectory control on a 6-DoF manipulator
- ↑Elastic Structure Preserving (ESP) Control for Compliantly Actuated Robots
- Impedance Control for Soft Robots — Youtube- DLR RMC
- Youtube- KUKA
- Justin Humanoid Robot with DLR III arms and DLR II hands — Youtube- Hizook
- Joint Impedance Control with Kuka lwr — Youtube- Hamid Sadeghian
- Cartesian Impedance Control wwith KUKA LWR — Youtube- Hamid Sadeghian