
The skin is not only the largest organ in our body, but also the largest sensory system that collects information every second about external stimuli and the levels of their impact on our body. From a mechanical point of view, the reconstruction of human skin is not so difficult, but it will only be an artificial protective layer devoid of neural activity. Scientists from the Royal Melbourne University of Technology (Melbourne, Australia) have developed a system of artificial sensors that mimic various human skin sensors. What was required to create such a complex imitation, what is the principle of operation of the device, what stimuli is it capable of perceiving, and where can this development be applied? We will find answers to these and other questions in the report of scientists. Go.
Research basis
The sensory system of the human skin can be divided into several subsystems, each of which is responsible for certain stimuli. The most common and important receptors are pressure receptors (Pacini corpuscles), temperature receptors (thermoreceptors) and pain receptors (nociceptors).
Each of these receptors collects information and transmits signals to the human brain for processing and making appropriate decisions. Other sensory systems (vision, hearing, taste, smell) have a similar principle of operation.
It is logical that such a biological system is extremely difficult to reproduce, even when taking into account modern tactile sensors and CMOS (complementary metal-oxide-semiconductor structure).
There are developments that implement an artificial nociceptor based on a diffusion memristor *, which can exhibit a normal state consisting of a stress and relaxation stage of the nociceptor, as well as an abnormal state with allodynia * and hyperalgesia * of the nociceptor using external stimuli as stress.
Memristor * is a passive element in microelectronics capable of changing its resistance depending on the charge passed through it.
Allodynia * is abnormal pain caused by an irritant that is usually not painful (such as pain when lightly touched).According to scientists, these developments are extremely important, since the switching mechanism of the memristor depends on the conductive filaments, which are approximately subnanometer in diameter. By using thermoelectric module and piezoelectric pressure module, it is possible to successfully achieve a tense and relaxation state among the four main functions of nociceptor.
Hyperalgesia * - an abnormally high sensitivity of the body to pain stimuli.
At the moment, a similar technique is used to create an artificial eye, but its implementation in the format of artificial skin has not yet been achieved.
In this work, scientists demonstrate a working prototype of artificial electronic receptors that mimic Pacini's little body, thermoreceptor and nociceptor. This was achieved through a combination of several functional components:
- memristor for decision making based on strontium titanate SrTiO3 (STO) with oxygen deficiency;
- Tensile elastomer gold based pressure sensor (polydimethylsiloxane, i.e. PDMS);
- temperature trigger based on vanadium oxide (VO 2 ) with phase change.
The main difference of this concept from the previous ones is that there is no need for separate and complex thermoelectric modules and piezoelectric pressure sensors for the practical implementation of somatosensors. Consequently, the development uses extremely inexpensive and readily available thin oxide films, as well as wearable pressure sensors on a biocompatible PDMS.
Research results
Before creating anything, you need to think about what and how will work in the final version. With the aim of creating artificial skin receptors, a hypothetical basis was developed for the implementation of functional Pacini bodies, thermoreceptors and nociceptors (diagram below).

Image # 1
Human somatosensors are connected to the spinal cord through the spinal horns (gray matter protrusions), which transmits information to the brain ( 1a ). There are special ways to determine pressure (blue at 1a ) and temperature (red at 1a ).
Pacini bodies are layers of membranes filled with fluid. Fingerprints are a prime example of Pacini's little body. When local pressure is applied to the body, part of the body is deformed, causing a shift in chemical ions (for example, sodium or potassium) and, as a result, a receptor potential arises at the nerve endings of the skin. This receptor potential, when sufficient energy (threshold) is reached, generates an electrical impulse within the corpuscle, which travels through the central nervous system to activate a motor response via nerve fibers (blue at 1a ).
When the skin temperature rises above 30 ° C, the thermoreceptor detects heat and triggers action potentials. The excitation frequency increases with increasing stimulus temperature until it reaches the saturation value. In addition, the heat nociceptors that pick up pain signals start to fire at around 45 ° C. These cells specialize in detecting harmful heat and burns.
When a harmful stimulus is received by a thermal neuron located at a free nerve ending, an electrical response is sent to the nociceptor to compare if the amplitude of the stimulus crosses the threshold for generating an action potential and sending it to the central nervous system via the spinal cord (red at 1a ).
To create similar artificial receptors, gold and PDMS pressure transducers have been used that switch between low resistance (LRS) and high resistance (HRS) states with and without applied pressure to simulate Pacini corpuscles ( 1b and 1c ).
To mimic the behavior of thermoreceptors and nociceptors, a VO 2 phase transition was used , which can transition from HRS at room temperature to LRS at temperatures above the transition temperature (68 ° C).
In addition, STO (strontium titanate) -based resistive switching memory was used as a decision-making element for evaluating threshold levels.
For an artificial Pacini body, when there is no detectable pressure, the current through the decision memristor (I 1 ) is insufficient due to the bias voltage to initiate the motor response ( 1b ). When pressure is applied, the transmitter enters HRS mode, blocking I 2 , allowing maximum current to flow through the memristor. Due to the higher I 1, the STO based memristor switches to the LRS. Consequently, a higher current flows through the body, causing a motor reaction ( 1c ).
In the case of the thermoreceptor and nociceptor VO 2can exhibit a change in resistance of three to four orders of magnitude at the junction temperature. If the temperature is below the junction temperature, then VO 2 is an insulator.
Thus, a small amount of current flows through the receptor, and the voltage that appears on the memristor is not enough to turn it on ( 1d ). When the junction temperature is reached, VO 2 switches to the LRS, as a result of which a higher potential appears on the memristor, which causes it to switch to the LRS. When both VO 2 and STO are in the LRS, an increased current flows through the receptor ( 1e ).
Artificial body of Pacini
After creating the concept of a future device, scientists began a phased implementation. The first stage was the creation of an artificial Pacini body, for which a memristor based on oxygen-deficient STO with a stack structure was used: Pt (100 nm) / Ti (10 nm) / STO (55 nm) / Pt (25 nm) / Ti (7 nm) and a SiO 2 substrate .
The bottom Ti layer is used as an adhesive layer of the lower Pt layer, and the upper Ti layer is used as an oxygen reservoir and also as an adhesive layer of the Pt upper layer. The lower Pt layer takes part in the switching process, while the upper one serves as an inert material that prevents TiO 2 from being exposed to ambient oxygen.
The pressure transducer architecture is inspired by Pacini's biological corpuscle, which is helical in shape with a track width of 100 microns. The diameter of the entire coil is 7.8 mm. To create a sensor, Au (200 nm) / Cr (20 nm) was deposited on a PDMS with a thickness of 300 μm.
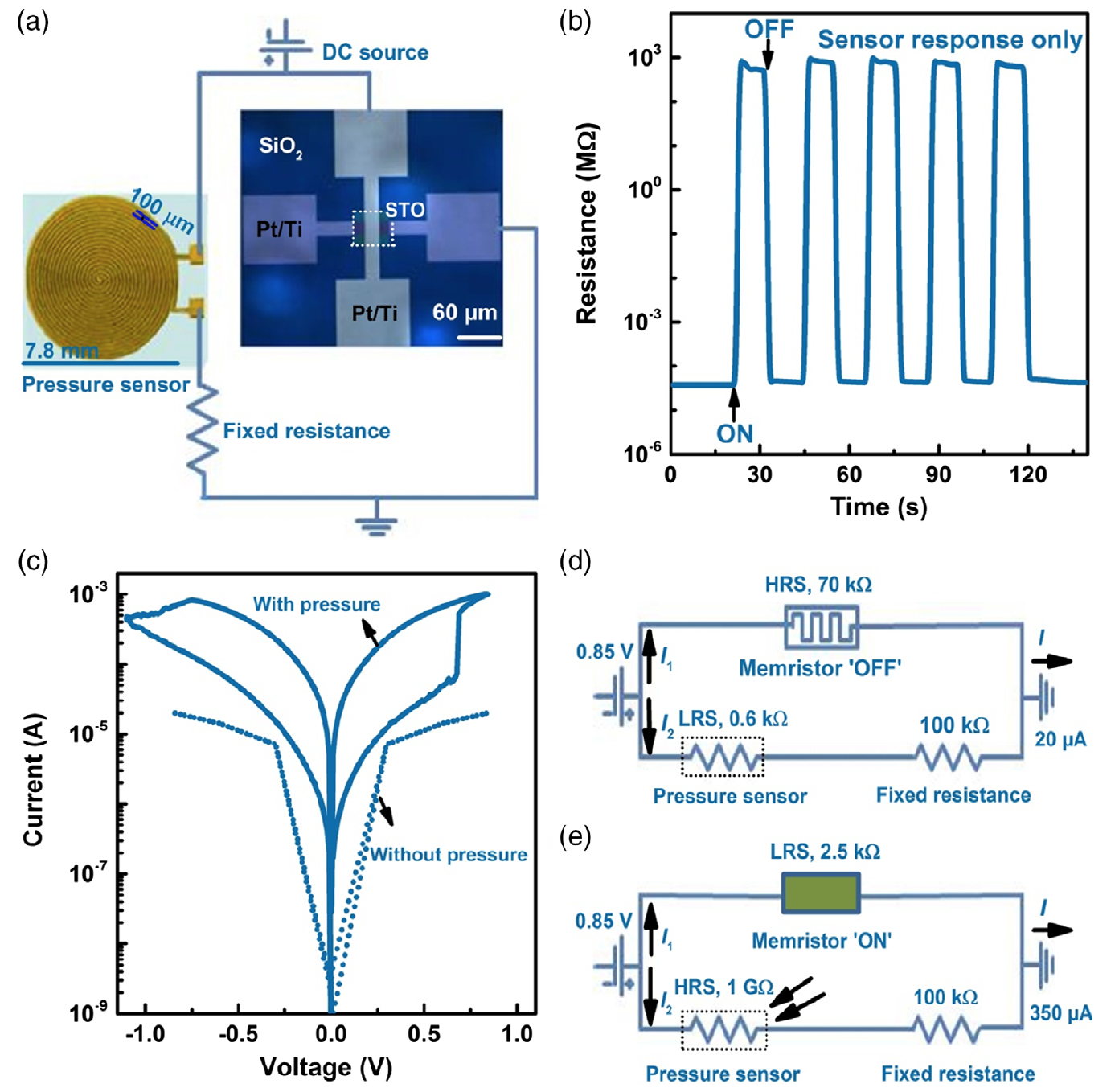
Image # 2
Image 2a shows an artificial equivalent of a calf with the integration of a memristor and a pressure sensor.
The pressure sensor network works in such a way that it allows the receptor to activate the memristor, which acts as a decision-making component.
In biological systems, when sufficient receptor potential is reached, the decision-making component can create an electrical impulse to activate the motor of the central nervous system. To replicate this function with a specific threshold value, the pressure sensor is required to sense a specific range of pressure values. For simplicity of demonstrating the efficiency of the system, scientists decided to simplify this point to only two values: there is strong pressure and there is no pressure at all.
A fixed resistance of 100 kΩ was chosen to limit the current through the pressure sensor network, which has a resistance of only 0.6 kΩ. This ensures that the system displays a very low current in the absence of pressure. Figure 2bshows the response and repeatability of a stand-alone pressure transducer.
When pressure is applied, the pressure transducer goes into very HRS with a resistance of about 1 GΩ due to deformation and cracks, which are very common with PDMS based transducers. Deformations and cracks can degrade the performance of the pressure transducer after multiple cycles, but this does not prevent the demonstration of the artificial transducer concept itself. When the pressure is released, the cracked gaps close again, creating an LRS, causing the sensor to return to its original state.
A similar pattern is observed in biological sensors, which also deform, which leads to a shift of chemical ions when pressure is applied.
It should be noted that the decision component consisting of the STO memristor element must be initially electroformed by applying a bias voltage at a very low current of 1 μA to the upper and lower electrodes. This stage creates a localized channel for the formation of conductive filaments through the STO. A voltage sweep is then required to switch the device between HRS and LRS states.
It is also important that, without the applied pressure, the current flowing through the memristor is insufficient to switch it. However, when pressure is applied, the sensor containing the branch enters the HRS state, which leads to the maximum potential of the receptor on the memristor ( 1s). When the threshold of the receptor potential is reached, the decision-making memristor switches from the HRS state to the LRS state ( 2c ). In this state, the applied sequence 0 → +0.85 V → 0 → 1.12 V → 0 switches the device to the LRS state for the positive cycle and to the HRS state for the negative half cycle ( 2d and 2e ).
To convert a device to LRS, only the positive half cycle is taken into account. According to image 2d , when no pressure is applied, the pressure sensor circuit has a total resistance of 100.6 kΩ, while the parallel decision component (memristor) has a resistance of 70 kΩ. Thus, the equivalent resistance of the entire Pacini body is 41.2 kΩ.
This equivalent resistance carries only 0.02 mA of current through the entire circuit, which can be considered a relaxed state. Applying pressure converts the pressure sensor circuit to an extremely high resistance of 1 GΩ, while the resistance of the memristor is only about 2.5 kΩ, changing the equivalent resistance of the entire Pacini body by about 2.5 kΩ. This low impedance condition allows a current ≥ 0.35 mA throughout the entire circuit.
Thus, the pressure stimulus generates a response signal that is almost 18 times higher than in a relaxed state, which can allow the central nervous system to initiate its motor response. After the motor response is complete, reverse polarity can be applied to the memristor using unused electrodes to initialize the Pacini corpuscle.
Artificial thermoreceptor
To create a thermoreceptor at the base of the memristor, the same stack structure was used as for the Pacini little body, i.e. metal-insulator-metal (MIM).
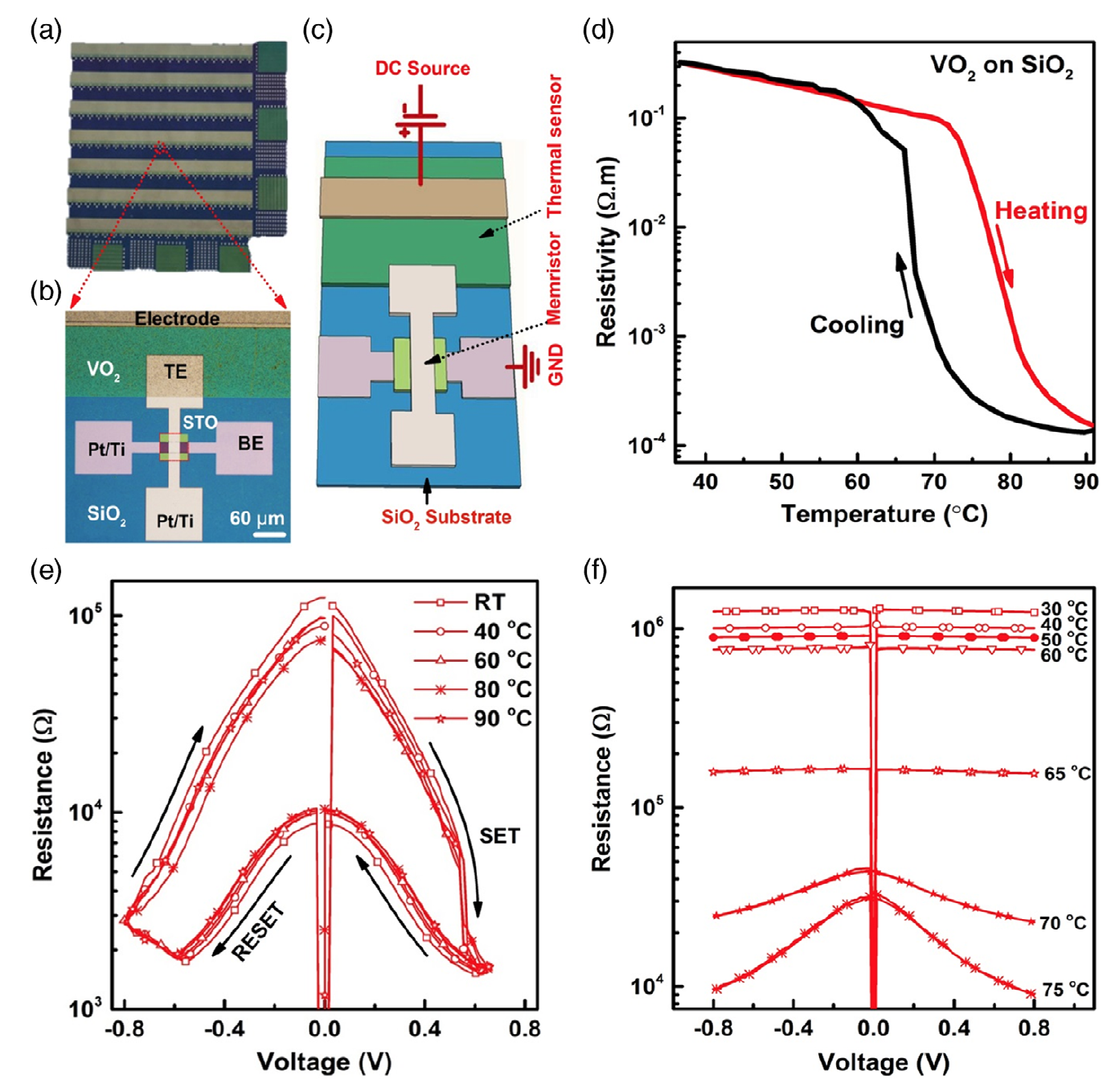
Image №3
Part upper electron used in conjunction with the surface of VO 2 ( 3 a and 3b ) for sequentially connecting a thermal sensor. To displace the entire device, this Pt (100 nm) / Ti (10 nm) electrode layer was deposited on the VO 2 surface . A substantial distance of 100 μm was maintained between the initial electrode and the upper memristor electrode.
In the image 3cshows a thermoreceptor connection diagram, in which the bias is applied through the metal to the thermal sensor, and the ground (GND in the diagram) is connected to the lower electrode of the memristor making the decision.
Graph 3d shows the resistance versus temperature curve for the dielectric-metal transition on a thin VO 2 film . Obviously, when the transition temperature is reached, the resistivity drops by four orders of magnitude. Obvious thermal hysteresis is also observed in heating and cooling cycles. It was also found that there was no noticeable effect of temperature on resistive switching ( 3e ).
The memristor can indicate the change in resistance from 100 kΩ to 2 kΩ during the switching process. However, for a clearer analysis, it was decided to consider the resistance of the HRS state as 93 kΩ, and the resistance of the LRS state as 9 kΩ at 80 mV read voltage (V READ ), since at this voltage the maximum switching ratio R OFF / R ON is observed . The voltage switching sequence of the finished off-line device was: 0 → +0.65 V → 0 → 0.80 V → 0. When the same sequence is applied to the entire thermoreceptor, the resistance decreases and hence the receptor current increases with increasing temperature ( 3f ).
To provide the required switching voltage, the receiver temperature was maintained at 70 ° C. This is to ensure that VO 2 is in the LRS state. Then applying a 0 to 2 V bias voltage completely sets and resets the device ( 4a ).
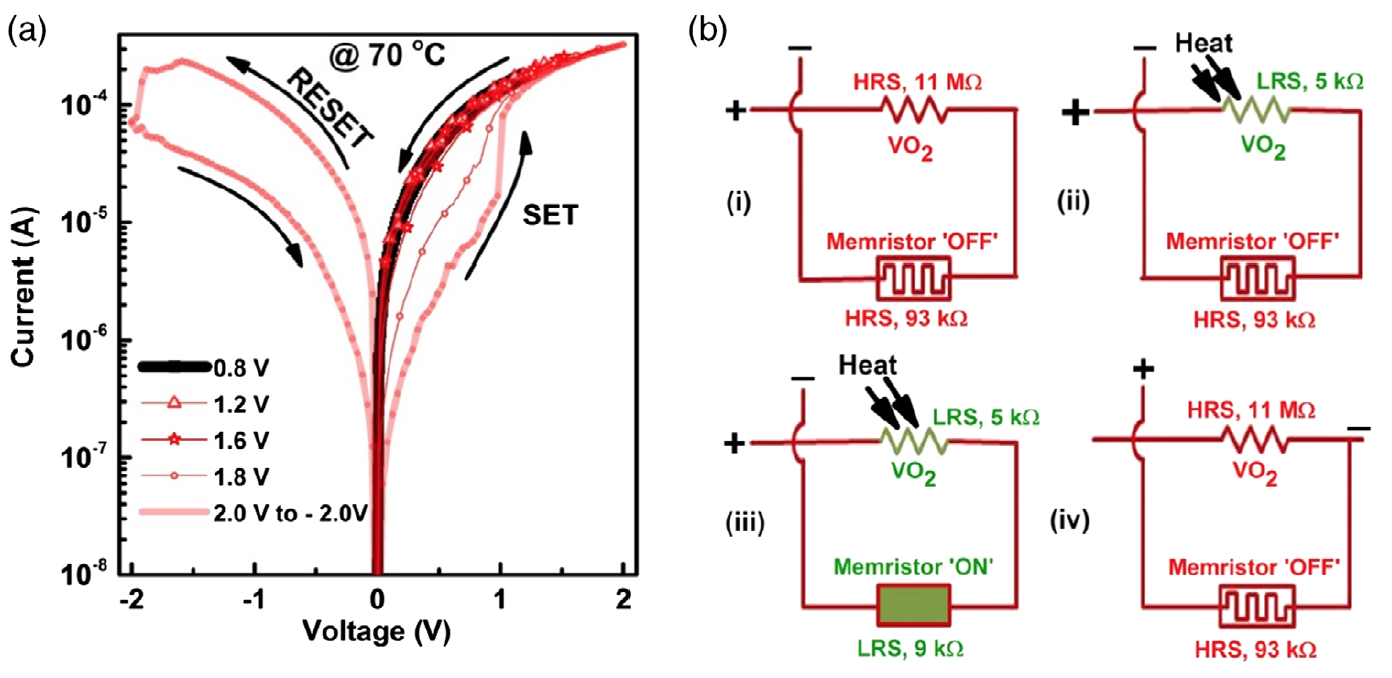
Image # 4
For a memristor making a decision, the initial resistance of 93 kΩ is much lower than the HRS of the thermal sensor, which is 11 MΩ. Thus, the partial voltage that appears at the decision memristor cannot reach the VSET threshold for converting it from HRS to LRS. Therefore, both the thermal sensor and the memristor are in the HRS state, which allows a minimum current to flow through the thermoreceptor [ 4b (i) ].
When a critical temperature of 70 ° C is applied, the resistance of the temperature sensor decreases by four orders of magnitude, and the partial voltage of the memristor gradually increases to the SET voltage with increasing receptor response [ 4b (ii) ]. As soon as the VSET turns on the memristor, it goes into the LRS from the HRS with a resistance of 9 kΩ [ 4b (iii) ].
At this stage, the maximum receptor response is formed. LRS memory will persist for a long time even if the thermal stimulus is completely disabled. To reprogram the memristor, the negative voltage VRESET can transfer it from LRS to HRS [ 4b (iv) ]. For this, negative voltage can be applied from unused electrodes ( 3c ).
Artificial nociceptor
It's safe to say that nociceptors are significantly different from their counterparts. Nociceptors are found throughout the human body and are located at the end of the sensory neuron axon.
To avoid exposure to harmful stimuli, the nociceptor responds in two ways: normal and abnormal.
Under normal conditions, when a nerve terminating in the skin receives a harmful stimulus, a response signal is sent to the nociceptor in order to compare if the signal exceeds a certain threshold value and decide if it is necessary to generate an action potential for the central nervous system. In this normal state, the nociceptor is slowly turned off for a time known as the relaxation process. By utilizing this threshold and relaxation process, the nociceptor insulates the body from any unwanted critical and continuous stimulus.
An abnormal response occurs when the body is faced with stimuli close to the threshold for damage to the nociceptor, and in this state, the nociceptor acts like a normal receptor to avoid further damage. If the injury was still received, then the vulnerability of the affected tissue increases. The nociceptive system adapts to this increased vulnerability by locally lowering the nociceptive threshold and facilitating the nociceptive response, thereby providing adequate tissue protection.
The nociceptor exhibits two distinct behaviors under abnormal conditions: allodynia and hyperalgesia.
Allodynia responds at a lower threshold, while hyperalgesia produces a stronger response when the threshold is exceeded, indicating that there is no nociceptor threshold in the abnormal condition.
To observe the behavior of the artificial thermoreceptor under normal conditions, which acts as a nociceptor during noxious stimuli, the device was switched to LRS and the reading was read at V READ of 80 mV.
Since the response of the biological nociceptor is highly dependent on the intensity of the stimulus, the artificial nociceptor was exposed to a series of temperature stimuli with different intensities ranging from 66 to 82 ° C ( 5a ).

Image # 5
Graph 5b shows the response signal relative to the intensity of the applied thermal stimulus. It should be noted that the nociceptor does not turn on until the temperature pulse reaches 68 ° C, which is the transition temperature of the VO used2 . Thus, when the VO 2 misses the LRS due to temperature-induced transition, a high current starts flowing across the circuit. Such a command resembles biological systems in which the nociceptor generates an action potential that triggers the brain when the strength of the stimulus reaches values above the critical value.
A further increase in the stimulus intensity above the threshold value leads to a greater current, which is also consistent with the response of the biological analogue: the higher the stimulus intensity, the higher the response intensity. Graph 5c shows the heating and cooling stimuli and the corresponding response at 68 ° C.
Graph 5dshows the attenuation of the response signal over time after the harmful stimulus has been turned off, i.e. a relaxation process that is determined by VO 2 , since there is no temperature effect on the STO based memristor.
Due to the tendency for the VO 2 resistance to increase with decreasing temperature over time, the artificial nociceptor limits the current through the circuit, and therefore a decrease in the intensity of the response signals is observed.
A stronger response due to higher stimuli requires relatively longer time for complete relaxation. For example, the response at 68 ° C takes 100 s to reach a base current of 0.5 μA, while the response at 80 ° C cannot fully relax in 100 s.
To observe the behavior of the device under abnormal conditions, a stimulus was applied to the artificial nociceptor, the intensity of which was much higher than under normal conditions.
The nociceptor was heated to 90 ° C at a rate of 20 degrees per minute and cooled to 60 ° C, which is below the threshold value (68 ° C) under normal conditions.
This was followed by reheating from 60 to 90 ° C, necessary to determine the presence / absence of generation of a lowered threshold and an enhanced response, which are the main properties of allodynia and hyperalgesia.
The sequence 60 → 90 → 60 → 90 was applied to the VO 2 portion of the receptor and to the entire receptor containing VO 2 and a metal-insulator-metal stack ( 6a ).
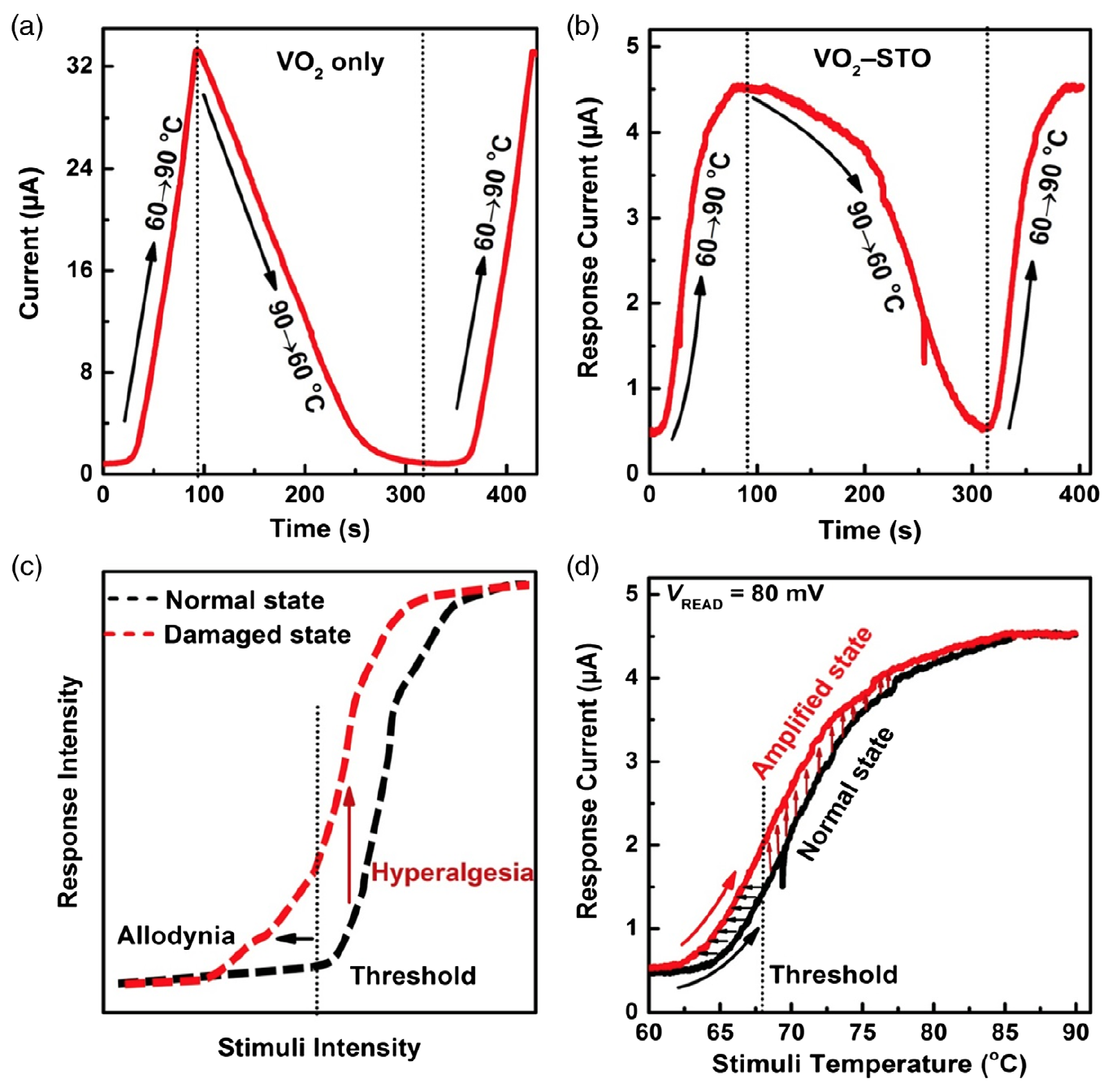
Image No. 6
The graphs clearly show that the response signal is much more linear in VO 2 ( 6a ) compared to the signal of the entire nociceptor ( 6b ). This is to be expected, since at high stimulus intensity VO 2 is in an almost metallic state with a relatively low resistance of 5 kOhm after the transition. Moreover, VREAD bias applied (80 mV) electrically adjusts voltage VO 2 to make it still more metal, which leads to a linear response.
At the same time, when a similar V READ bias appears across the entire nociceptor, the maximum voltage drop occurs across the memristor, which is in the LRS state (9 kΩ). At this stage, the voltage across VO2 is not enough to show a linear response. Therefore, this behavior is non-linear.
Figure 6c shows behavior in allodynia and hyperalgesia. In a biological system, the response intensity is higher in an abnormal state for subthreshold (allodynia) and suprathreshold (hyperalgesia) stimulus intensity.
On 6d shows a response with respect to two cycles of heating sequences with the sequence of 60 → 90 → 60 → 90 ° C. Here you can see that the response for the second heating cycle is increased, and the threshold is reduced.
The behavior of the artificial receptor clearly shows allodynia below the threshold intensity and hyperalgesia above the threshold intensity (70 ° C). It follows from this that by lowering the threshold and increasing the intensity of the response, the nociceptor activates and enhances defense reactions, such as withdrawal or avoidance of acute painful stimuli.
Demonstration of the principle of operation of the electronic equivalent of Pacini's little body.
For a more detailed acquaintance with the nuances of the study, I recommend that you look into the report of scientists and additional materials to it.
Epilogue
The human brain is one of the most complex biological systems. But one cannot deny the fact that human skin is no less complex, especially given the considerable list of functions it performs.
It is not difficult to recreate some of the functions of the skin in an artificial equivalent, but with regard to receptors that collect information about the environment, it will not work so to speak.
However, scientists have still managed to achieve some results in the creation of artificial receptors that capture pressure, temperature and pain.
According to the authors of this work, their device is able to distinguish between a light touch and, for example, a needle prick. At first glance, these are very commonplace things, but previously such accuracy was not present in electronic receptors.
In the future, scientists, naturally, intend to continue their work in order to expand the range of perceived external stimuli, which will make their device even more accurate. Such developments will definitely find their application not only in prosthetics, but even in robotics.
Thanks for your attention, stay curious and have a great weekend guys! :)
A bit of advertising
Thank you for staying with us. Do you like our articles? Want to see more interesting content? Support us by placing an order or recommending to friends, cloud VPS for developers from $ 4.99 , a unique analogue of entry-level servers that we have invented for you: The Whole Truth About VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps from $ 19 or how to divide the server correctly? (options available with RAID1 and RAID10, up to 24 cores and up to 40GB DDR4).
Is Dell R730xd 2x cheaper in Equinix Tier IV data center in Amsterdam? Only we have 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV from $ 199 in the Netherlands!Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - From $ 99! Read about How to build the infrastructure of bldg. class with Dell R730xd E5-2650 v4 servers at a cost of 9000 euros for a penny?