We, a small development team of one of the departments of YaKurier, really wanted to contribute to the rapidly developing space of unmanned technologies. Bought a Prius for experimentation, a bit of periphery, conceived their own trick with the focus of an intelligent system, imitating the driver's attention. We started. And what about the intelligent computer vision system itself and, along with it, the "subintelligent" system that provides the detection of novelty, that is, this very attention?
TensorFlow or something similar - ready-made? Several experiments make it clear that for dynamic multifactorial cases with rearrangements of input arrays, many subtasks, obvious uncertainty of many classes of recognized data, the inevitable scalability of the system during development, with the desire to add your own author's convolutions and layers, the option is "ready-made", oddly enough, requires sweat, blood, budgets and frustration from mistakes in the first steps, which spoil everything, and which can no longer be fixed (except with annoying crutches). And since we are a rather naive team, we decided to play in our own way. There is an opinion that the point is not in TensorFlow, but in the technology it implements, and we will be able to simplify something, improve something, and change something completely.
Let's talk first about the approaches to classification and pattern recognition, we are sure you know everything about them, but where can you go without eyeliner. We will stick to more human abstractions and visualizations instead of speaking in a strict mathematical language and take an abstract case of recognizing conventional cucumbers and tomatoes.
Classification and pattern recognition
Explicitly omitting the methods of extracting any signs of experimental objects, consider the case when we wonderfully know how to measure two of them: color (from red through yellow to green) and ellipticity of the shape (as the ratio of the axes). By saying "measure", any engineer implies that he can clearly associate a sign / phenomenon / value with a number, but since we have two of them, and they are quite independent, that is, color cannot indicate a shape, we can depict a rectangular coordinate system and talk about points or vectors in it, corresponding to their color x_1 and shape x_2.
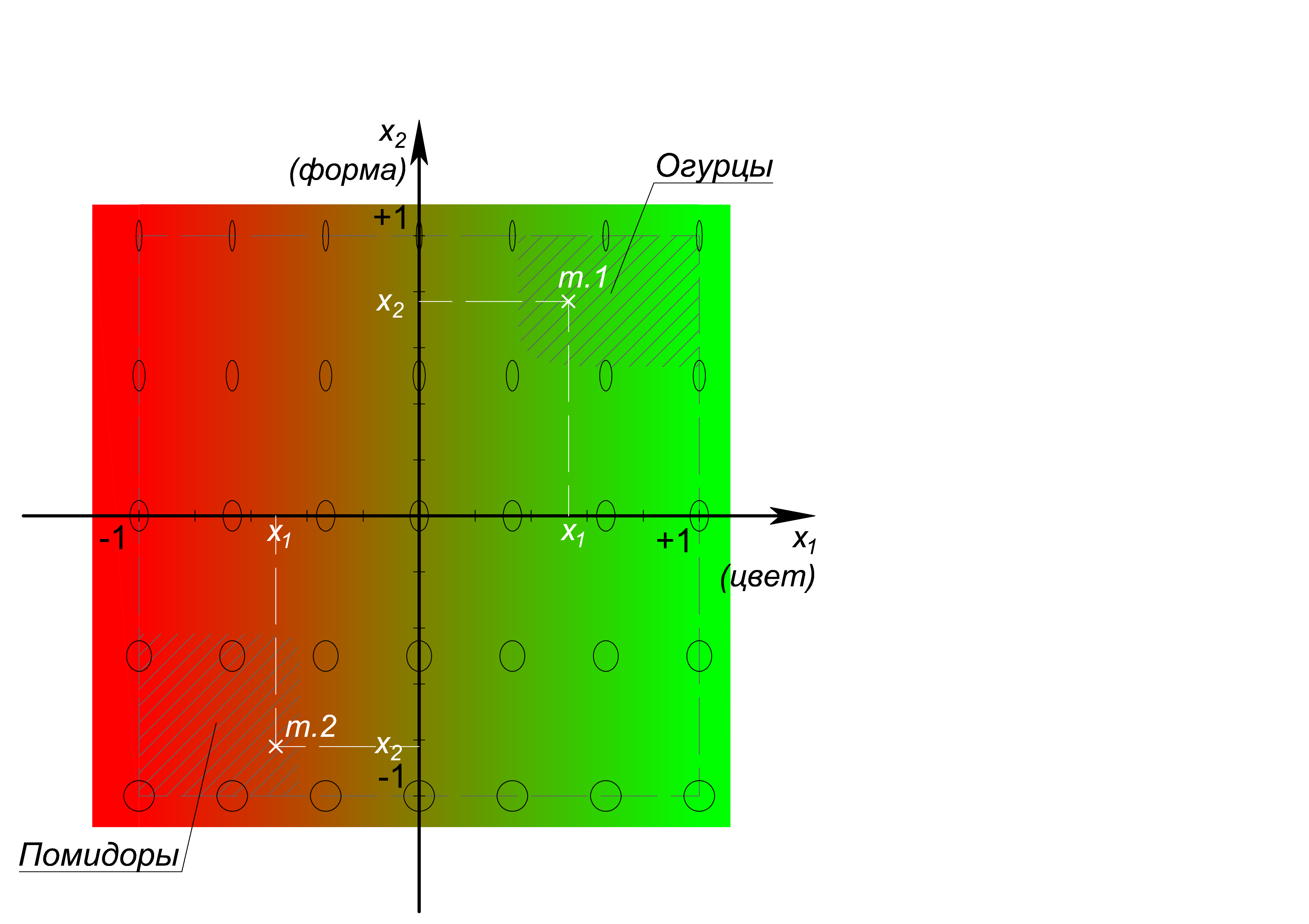
, , x_1: (-1), (+1); x_2: (-1), () 1/5 (+1). – , – , . , , , , , 1 {(x_1=0,53@x_2=0,77)} – , 2 {(x_1=-0,51@x_2=-0,82)} – .
, , – – 2 . , , , -, , -, , , , , , , 900 (3030 px) , 900- . , , , (, ).
? , . , , , - ? , , . , . , , : , , , , , :
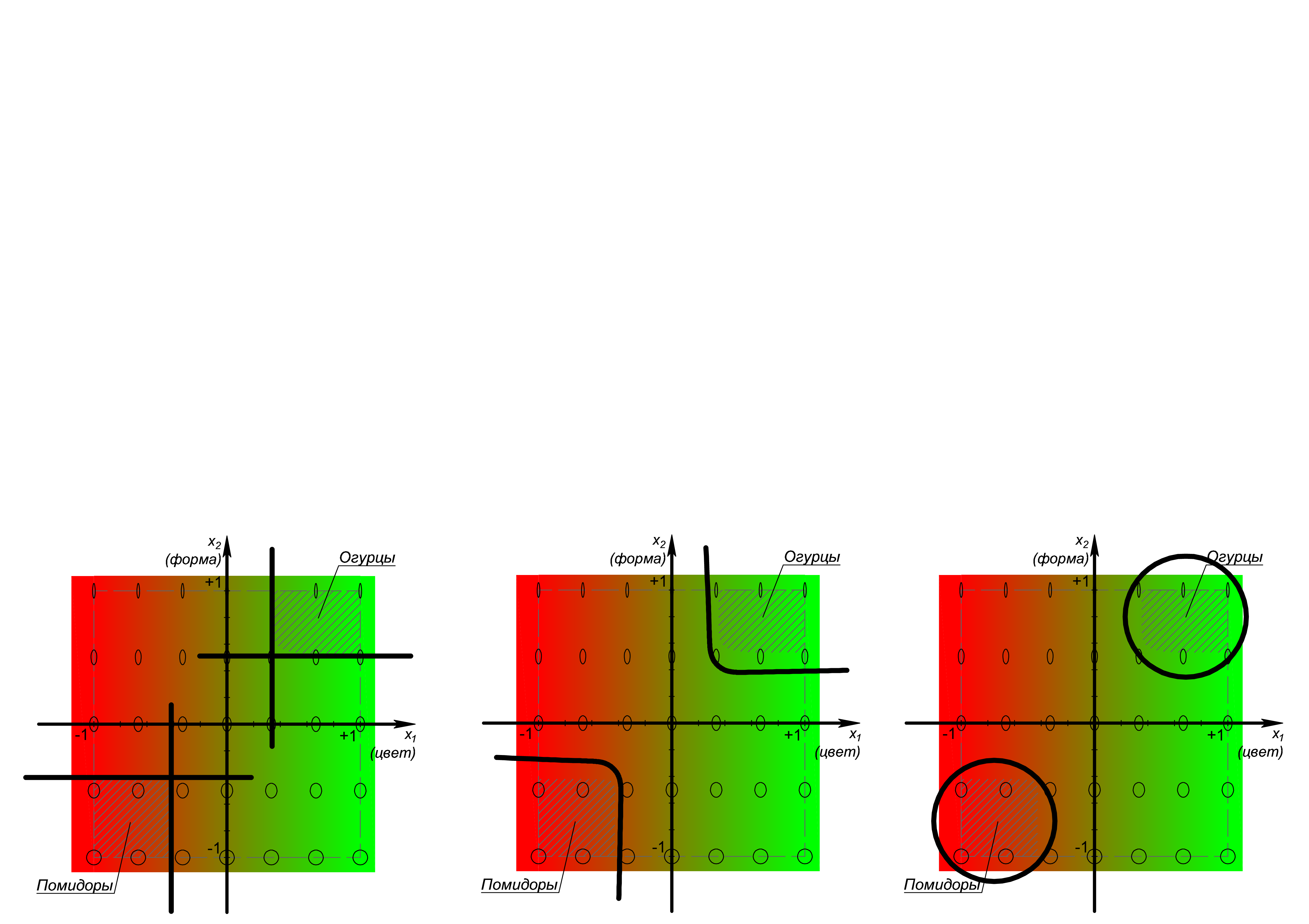
, 4- , .. N- .
II-
, , . , , , . :
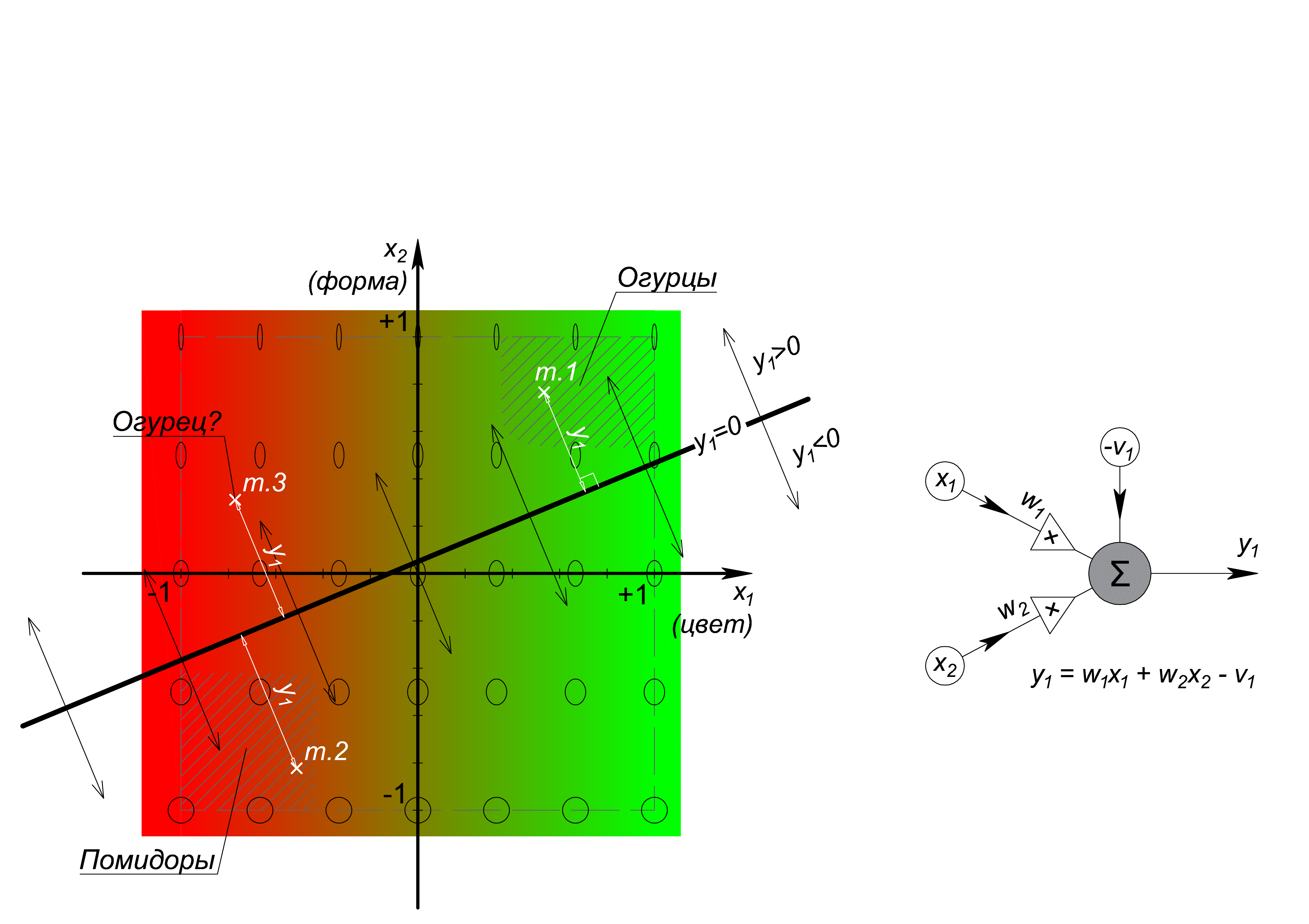
: Ax+By+C=0, A, B C w_1, w_2 -v_1, {x;y} {x_1;x_2 }. , N- – N-1. 0, () , , – « », – « », () – . «», «» «- » , - , (. ). . , , . .
0, «» « », «», «» « » « » 1- .
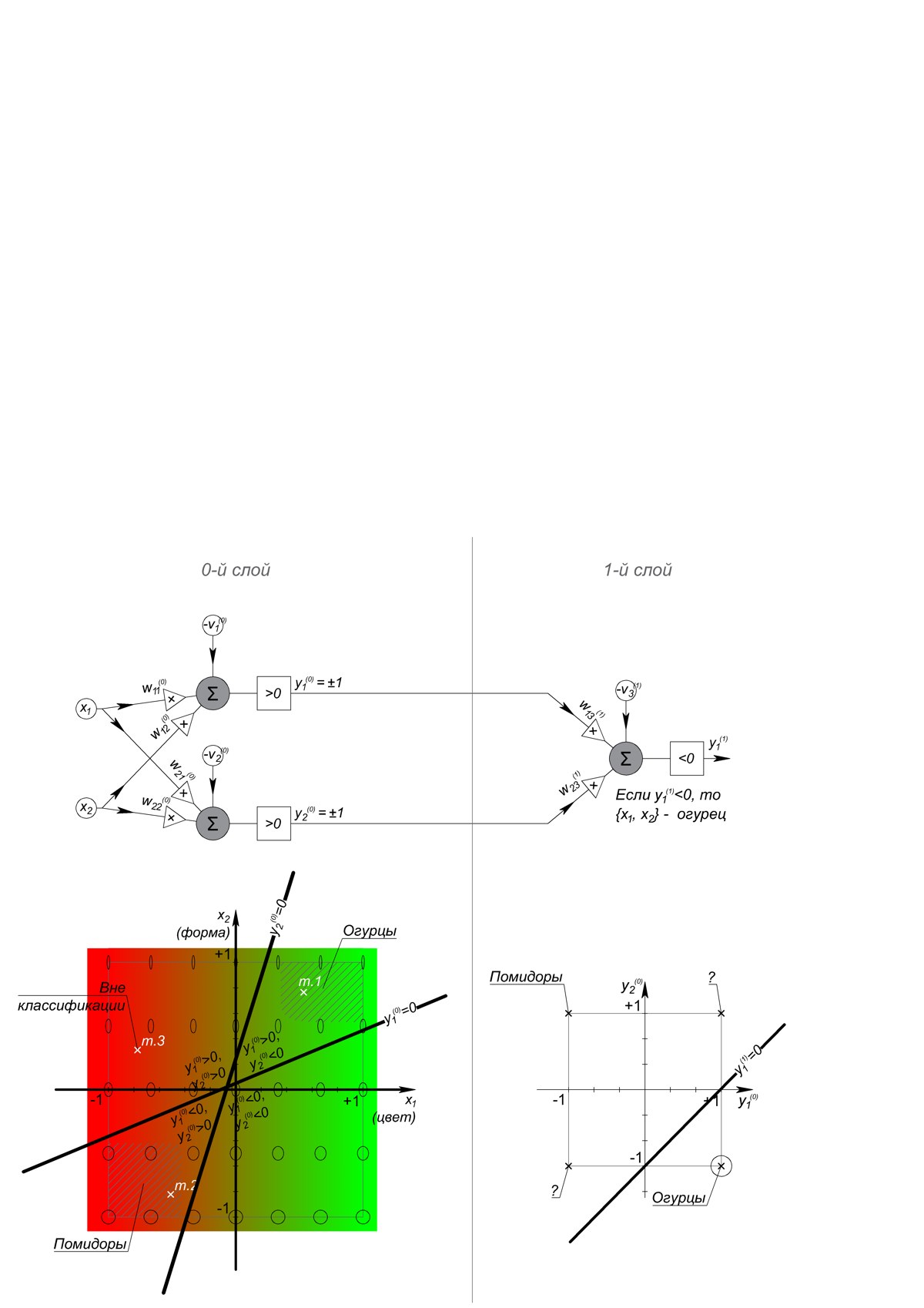
w (k)/j, , N- – . , , , . , 0 1 .
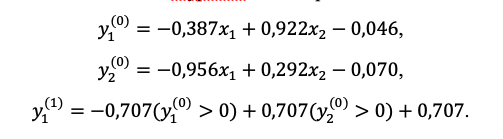
– , ( , – ):
– , , ( ), Ax2+By2+Cxy+Dx+Ey+F=0, . - , , ( , ). , / , , . .
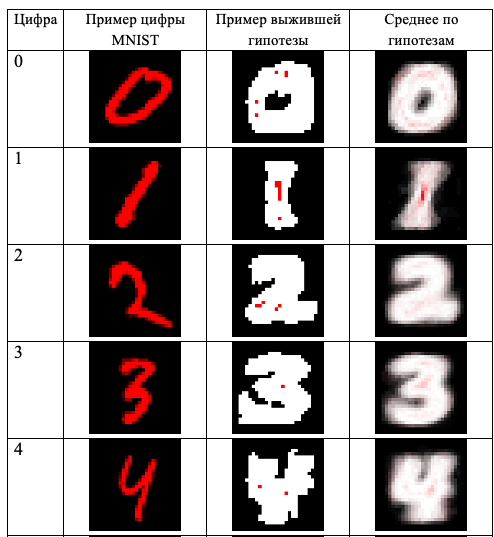
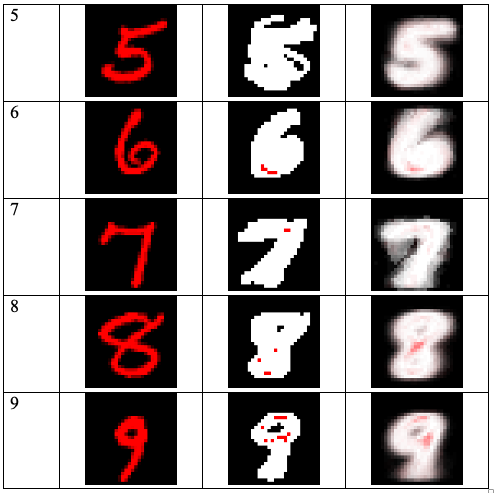
, - . – , , , – , – . : S-, A-, R- . , , MNIST, : , , :
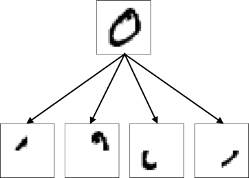
/ …
! , 1- :

. . -, , , , , (cost function) , , , . , - , «» , , , , , , , , , , , , – ( – , – ):
-, , , , , - , . , , , , , . . . 2-- - :
? , x_1: – (-1), – (+1); x_2: – (-1), 1/5 – (+1). , 2- - , , 900- ? , 1- , – . , . , II- – , , .
. , , , , . . , , .
, , , , .
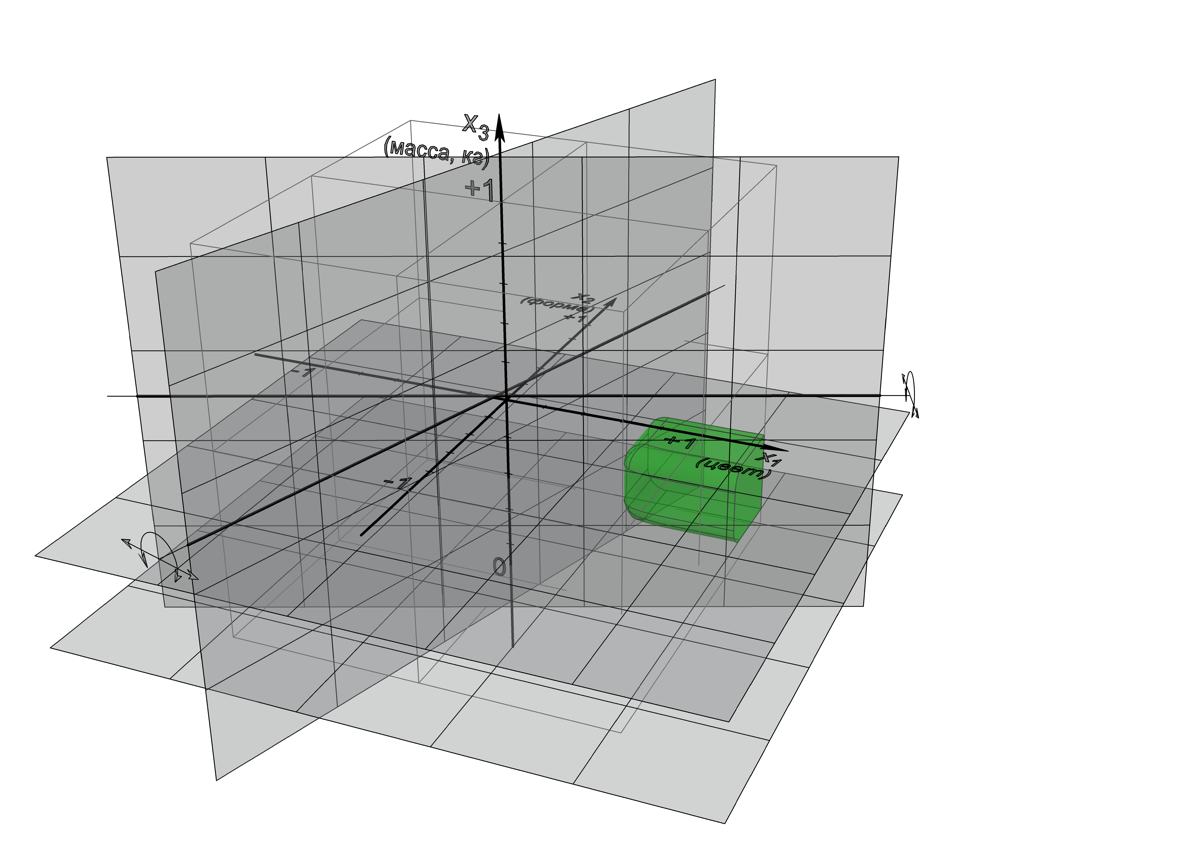
, , , , : , , , / , , . , , , , , , , , , , - .
. ? -, , , -, , , , . , , . , , , – .
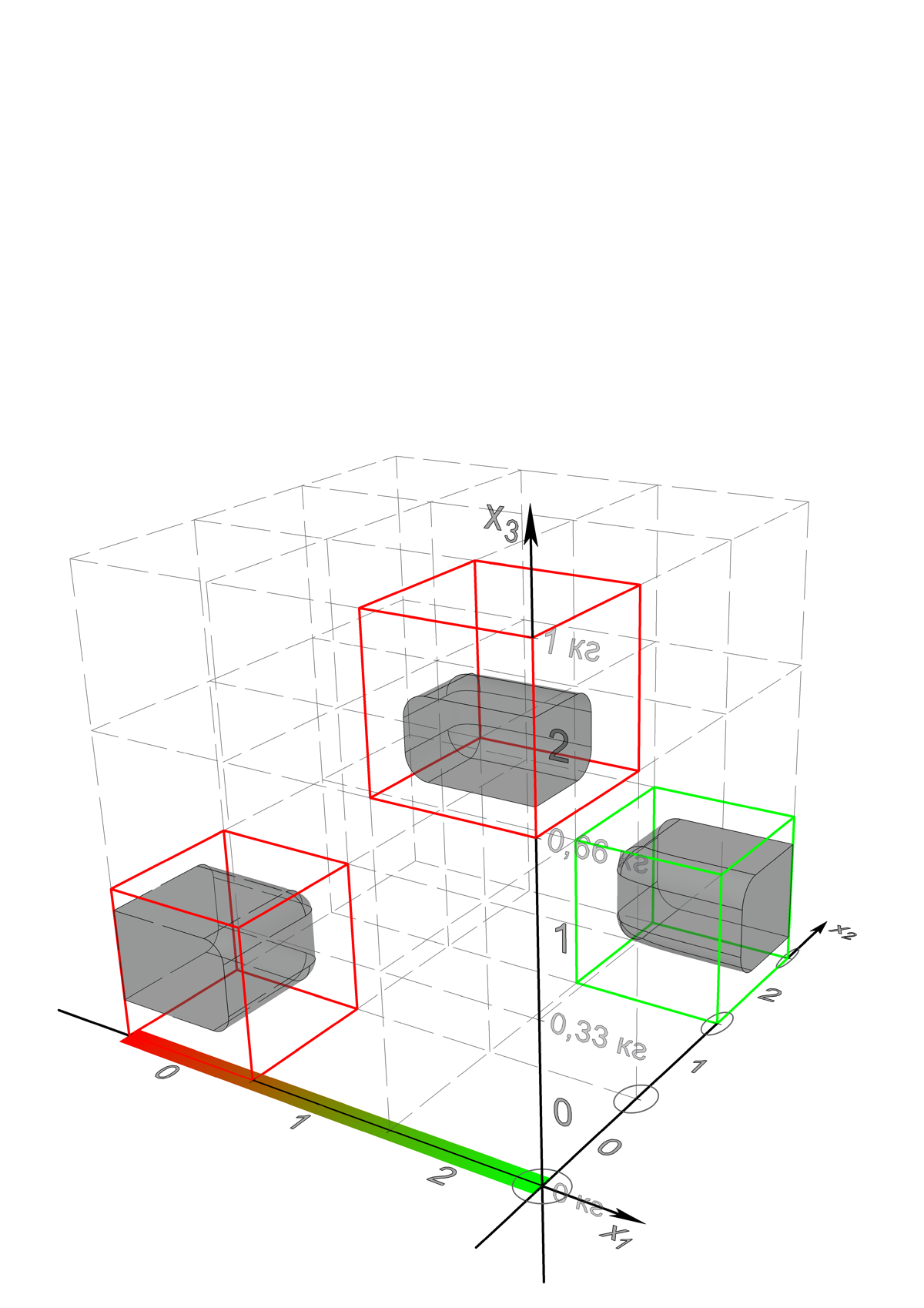
? {0;0;0} {2;0;2} , {2;2;0} – . , , . , , , , , , , .. , . , , , , , , , , .
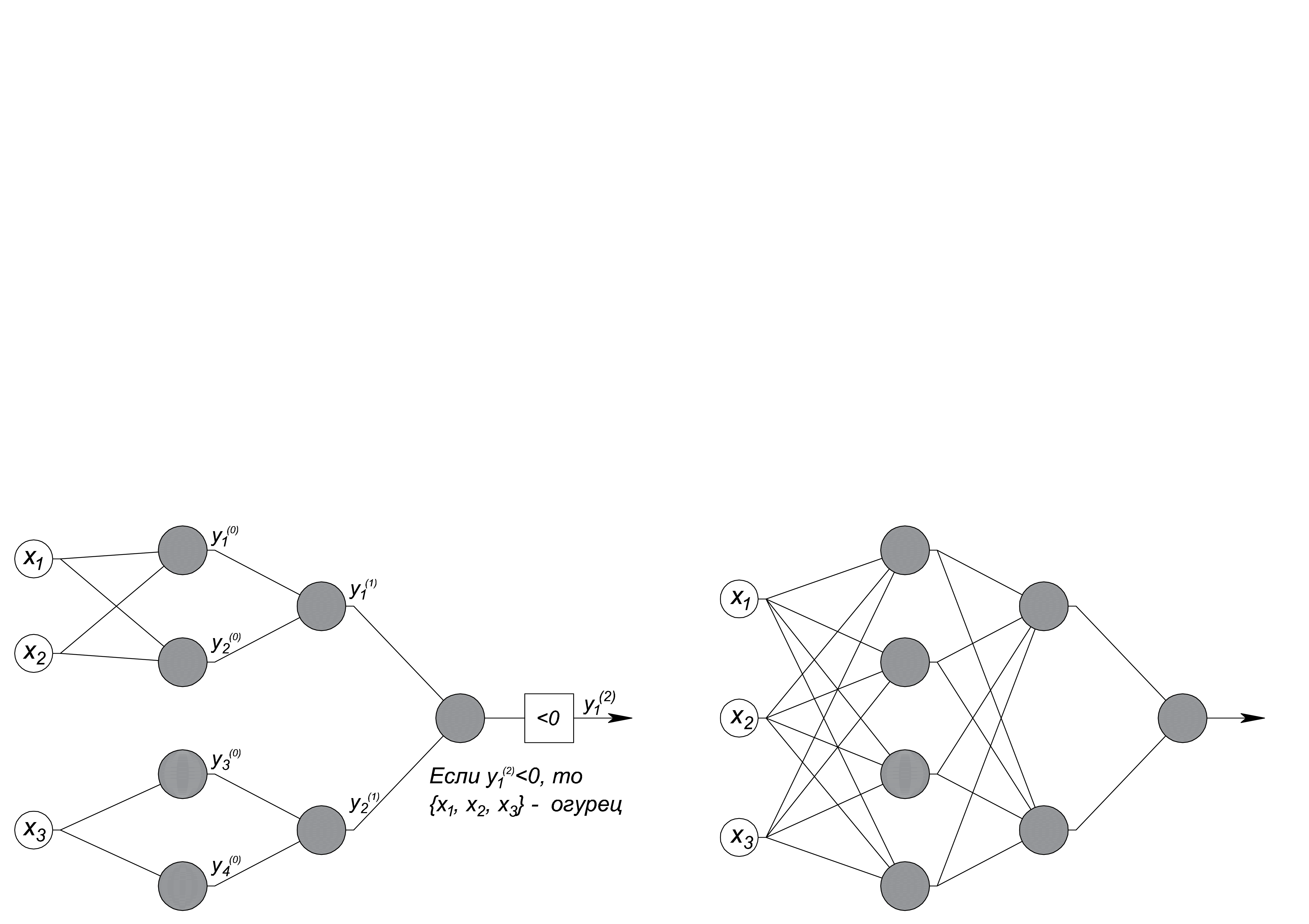
. , , , , , , , , .
:
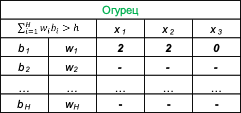
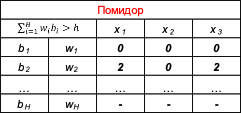
w_i – , b_i – , . h. , /, , – .
? , , , , , – . . , , , , , GPU CUDA.
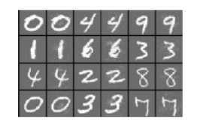
MNIST, 28x28 px. 10 10 , , – . , , .
, , , , , 30÷60 .
, , , . – MNIST, – , – .
, , . , , .
« » .
( « »), , « » « ». , , , , «».
, , , (), , , ( , ). , TensorFlow 2- , , MNIST 2,6%, . , .
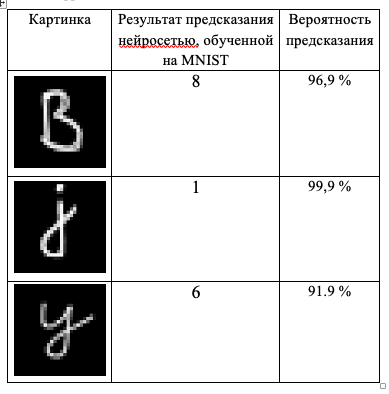
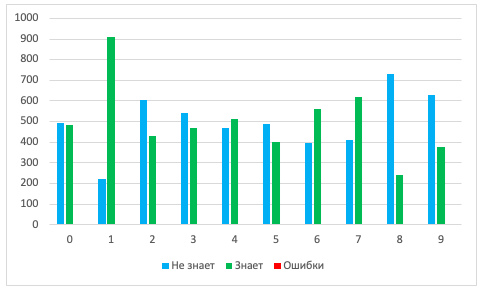
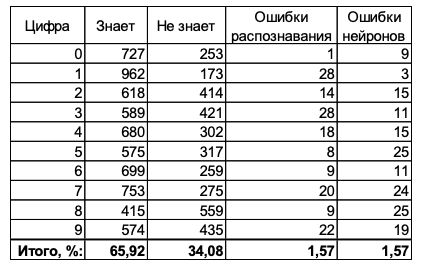
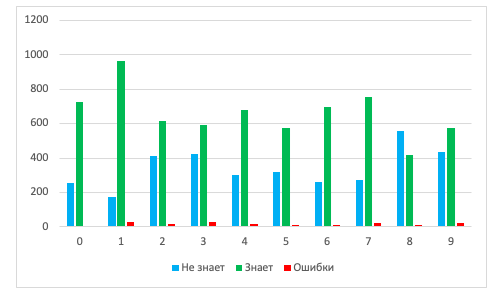
MNIST (10 000 ) « ».
, + 25%:

:
:
- ;
- , , , .
:
- , , , , ;
- ;
- , , ;
- .
, , , , , .
Hmm, what does the unmanned technology mentioned at the beginning have to do with it? We are confident that it is in this area that our intelligent network will find its main applications, allowing us to overcome the existing barriers associated with multiplicity, variability and heterogeneity in the perception and recognition of the environment.