
When implementing an object position control system, a two-loop structure is often used, which includes two regulators: the load position and the speed of the actuator. In this case, it becomes necessary to simultaneously adjust both regulators. This task can be solved using the Control System Tuner tool .
System model
, , .


.
Electric actuator Load : .
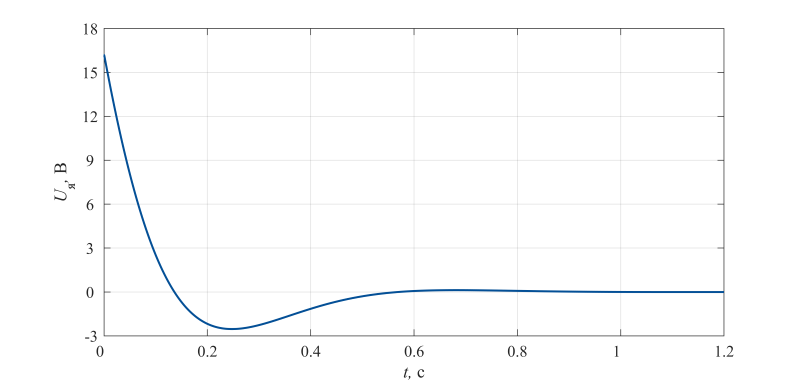
, ±24 , clamping .
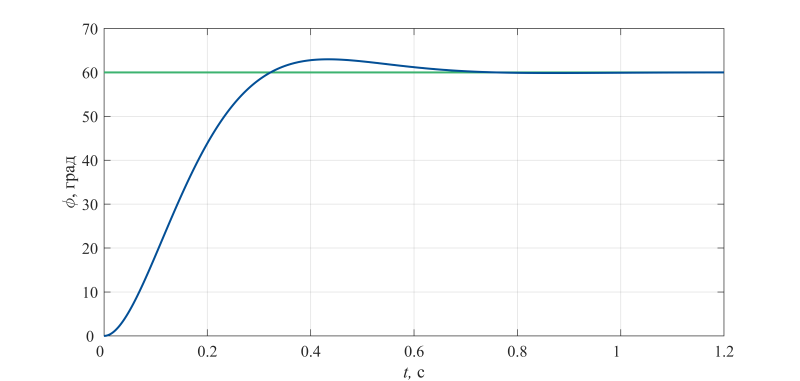
, ±60°.
, .. , , 2.5 .

:
- (Overshoot) 5%;
- (Settling time) 1 .
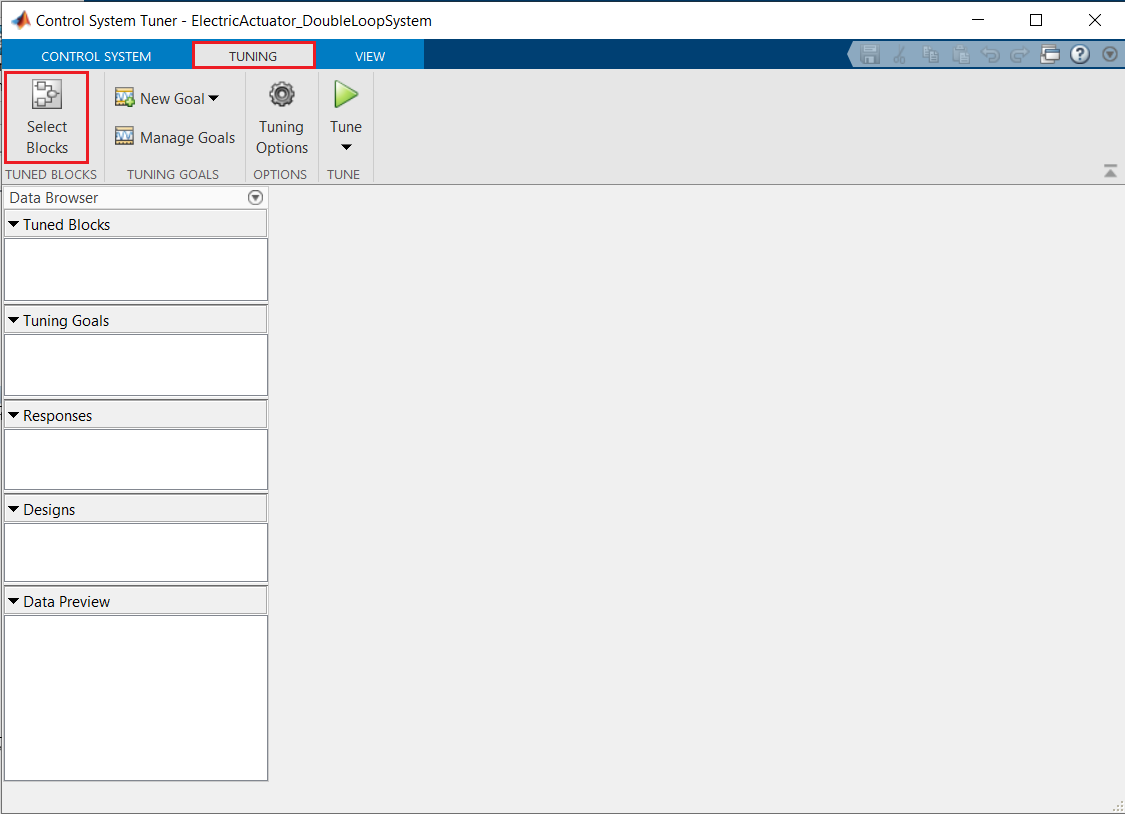
Control System Tuner APPS Simulink, CONTROL SYSTEMS.
:
TUNING Select Block.
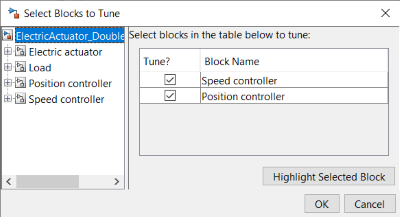
Add Blocks .

OK. Tuned Blocks Data Browser.
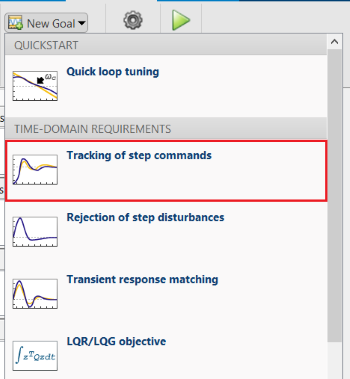
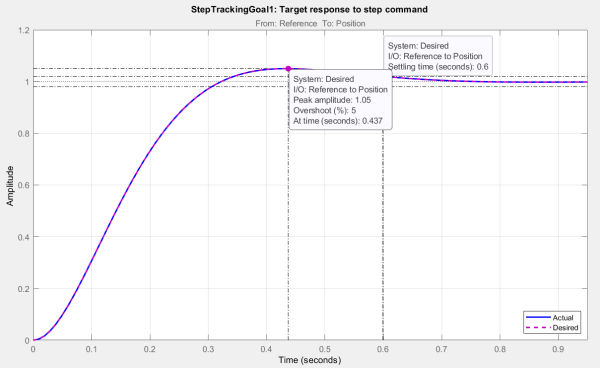
. New Goal Tracking of step commands TIME-DOMAIN REQUIREMENTS. Step Tracking Goal.
.
Specify step-response inputs Specify step-response inputs
Add signal to list → Select signal from model.
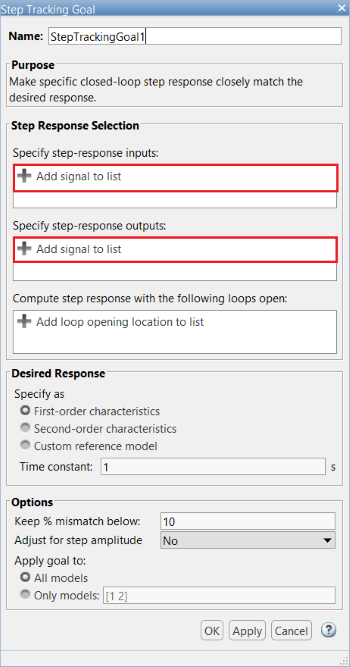
, Reference Position. . Select Signals . Add Signal(s).

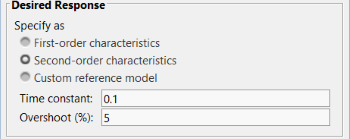
Desired Response . (First-order characteristics), (Second-order characteristics) (Custom reference model). .
Time constant () . Overshoot (%) — (). () () [1]:
, , , 0.1725 . , 0.1 . . .
: , .. , , . Tune . Data Browser Data Preview . Tuning Goals , . . , .
CONTROL SYSTEM Update Blocks.

.

- Modern Control Engineering (5th Edition). Katsuhiko Ogata