
We are developing a robot for collecting golf balls . We need a servo to open the ball drop hatch. We have tested a huge number and today we want to tell you about a very interesting analogue Dynamixel, which is more than half the price.
A modern model servo drive today represents a complete device in a single housing (motor with gearbox and control board). The most common way to control model servos is the PWM protocol, the position of the servomotor is determined by the pulse width, the presence of pulses serves as a switch-on signal. This approach allows you to simplify the electronics as much as possible, but it is not without its problems.
Firstly, there is no feedback, and there are also problems with connecting to a PC with similar platforms (usually an Arduino or another microcontroller is required as an interlayer). Secondly, due to the peculiarities of the protocol, the positioning accuracy rarely exceeds 1 \ 256 per servo range (270 or 180 degrees). Thirdly, mechanical breakdown and overheating cannot be detected. All these problems lead to the fact that such servos cannot be used in tasks where it is required to consistently control a large number of degrees with high accuracy.
To solve these problems, you need to use a common data bus. A popular complete solution is the well-known Dynamixel servomotors. The protocol is compatible with regular uart (simple negotiation scheme is required). It can be connected to any computer with this port (Arduino, Raspberry, pc). This approach allows you to synchronize the movements of servo drives, receive feedback, monitor performance (errors, temperatures), and tune the PID controller. Wiring is also simplified, now it is possible to assemble servos in series. The manufacturer has a wide range of models for every taste and color. However, the price remains well above conventional PWM servo drives.
And then we got a servo drive of domestic production IlyushaFully compliant with Dynamixel protocol v1. We wondered what kind of beast it was and what it could do. We decided to test it and what came of it we will tell below.
Basic parameters
Supply voltage 6-15V
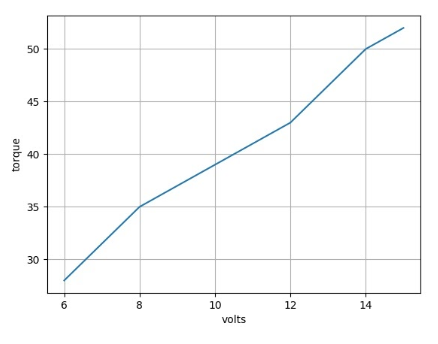
Maximum torque 60kg * cm
Encoder resolution 16384 parrot 360 degrees
Protection against overheating
Current protection
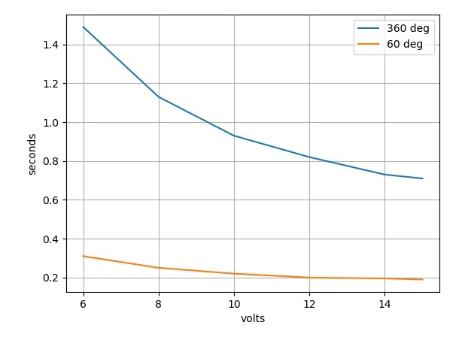
First, we will measure the rotation speed without load for a range of voltages
6, 10, 12, 14, 15 V
And now we will measure the maximum moment, at the same voltage values:
Transition time for a 60 degree movement.
And now the most unpleasant thing is the backlash in the gearbox.
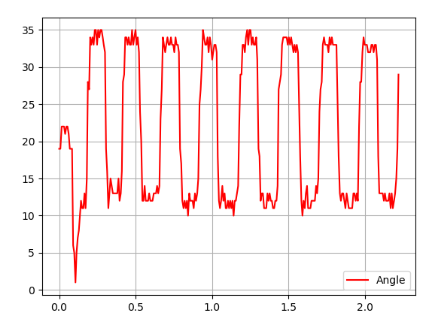
From this we can conclude that the backlash is ~ 0.5 degrees:

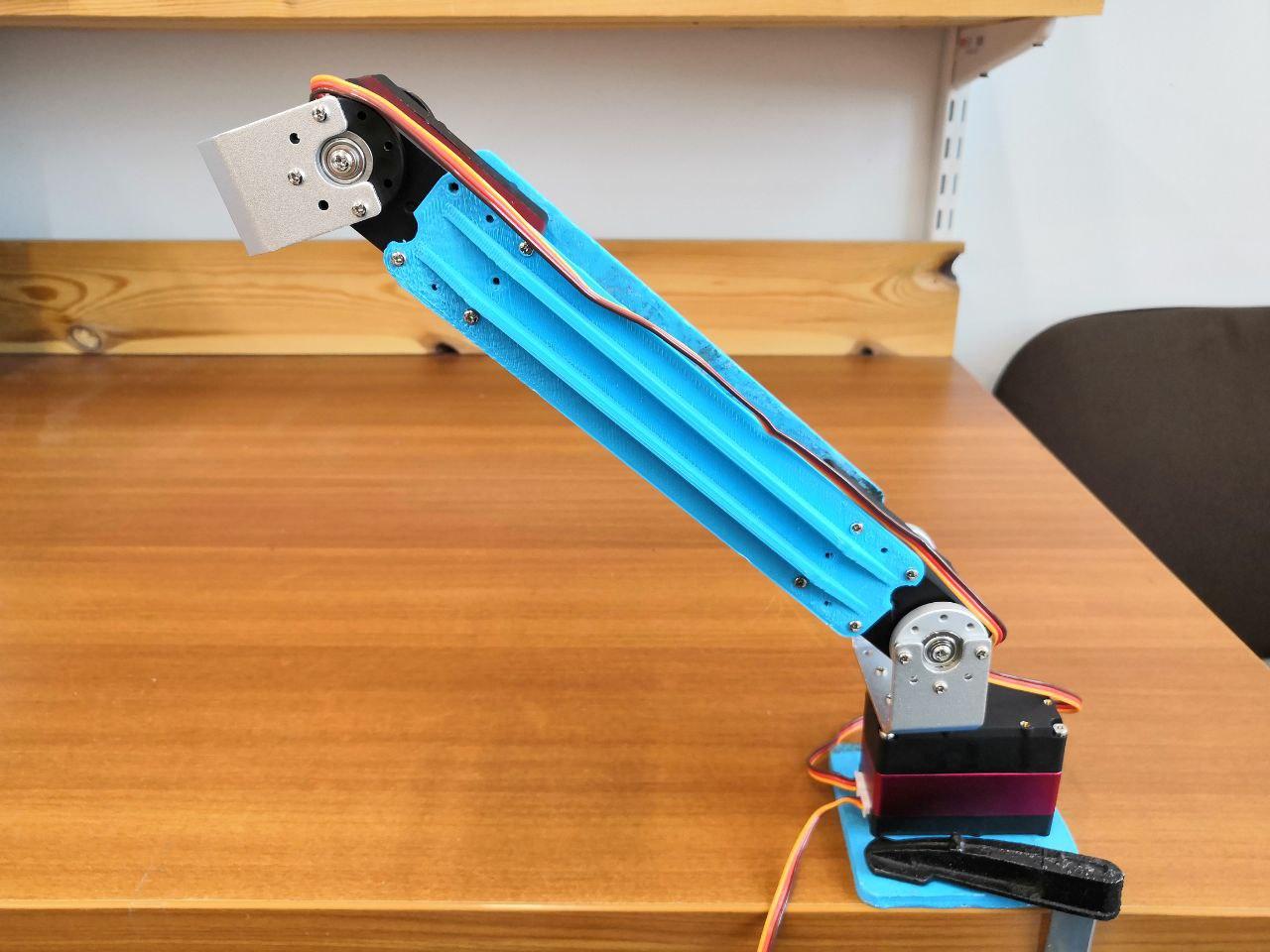
The characteristics are suitable for our purposes, considering the price is more than two times lower, we decided to use these servos in our device.