Once at the institute the head of the department told us about our future profession:
“Our profession is very important and responsible. Now you are working on the appearance of the future flagship of Russian aviation. You pour ideas, try to predict the tasks that he will solve, take responsibility and make decisions. And in 15 years, when the plane is finally built, everyone will be honored, but no one will remember about you. ”
I did not like such agitation, I am not ready to wait 15 years for the result.
Aviation is a highly developed industry, but high reliability requirements and a planned future do not allow the introduction of new technologies quickly. On the other hand, drones, on the contrary, have no special requirements yet, so they grow like mushrooms after rain, filling the niches of air monitoring, advertising, assistance to agriculture, video filming and the like.
So I decided, let them somehow build their fighters there without me, and while I am young and hot, I will go to drones. Fortunately, there is an aircraft model past.
What are the ways to develop aviation? In my opinion, aviation can develop in two ways:
- The use of innovative technologies for components (new efficient power plants with low weight, avionics, etc.).
- Change in aerodynamic design.
I am more impressed by the change in the aerodynamic design of the aircraft. This way aerodynamic schemes such as “duck” and “flying wing” appeared. But this was not enough for the engineers, they wanted the aerodynamics to change directly in flight. This is how aircraft with variable wing geometry appeared (Su-24, Tu-22M, Tu-160, F-111 and the like), aircraft with a controlled thrust vector (MiG-29OVT, MiG-35, Su-30, 37, 57, F-22 and others) and, of course, convertiplanes (for example, the well-known Bell V-22 Osprey).
This is all, of course, good, but not quite to my liking. The idea of a variable wing geometry is interesting, but it is necessary that if the wings are folded, then so that at all, and not a miserable few degrees. But the idea with rotary power plants appeals to me. And so the idea was born to make your own tiltrotor. Our idea can be schematically described as follows:
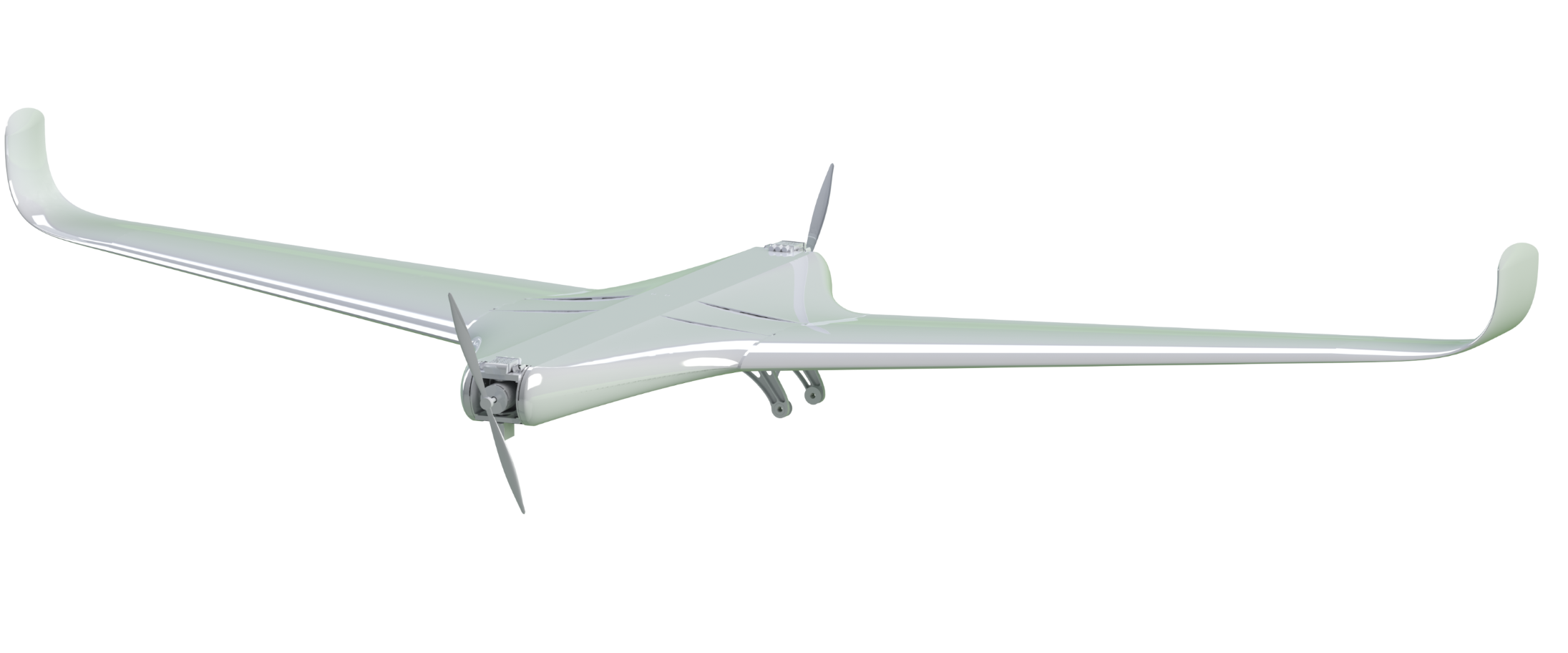
I put together a team and soon we decided. The idea of our tiltrotor was to combine the aircraft flying wing scheme and the helicopter longitudinal twin-rotor scheme. We decided that the wings would fold down, and not half of the wing, like in ship planes, but entirely, so as not to create additional drag when climbing in helicopter mode.
The tiltrotor will take off with the wings folded vertically down, then the motors will turn and the wings will unfold smoothly. The flight itself will take place in the flying wing mode, and if necessary it will always be possible to hover in place. When landing, it can land vertically, on its belly, or, in the event of an emergency landing, by parachute.
What are the advantages of this aerodynamic design?
- Due to the huge wing, we get high aerodynamic quality in the airplane mode, which significantly increases the flight range in comparison with other tiltrotors.
- Vertical take-off and landing (does not require a runway).
- The ability to hang in the air.
Finish the introduction and move on to the point. To implement the project, we need:
- Make a prototype.
- Create a stabilization system due to controlled thrust vectors.
- .
- , .
- .
1
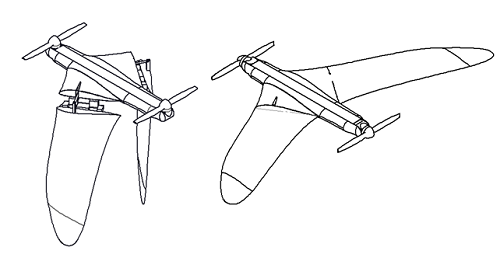
We started creating the first prototype. We did not have any special equipment, only hands and basic knowledge. We started by drawing the model in 3D.

The constructed aircraft looked as follows: The


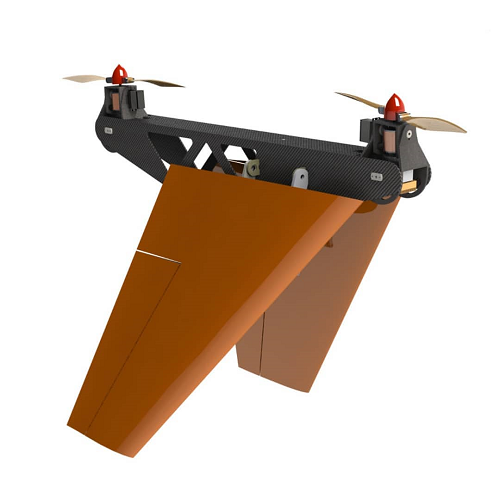
first model was obtained, for which we immediately prepared a test bench.
We wrote a simple code to control the motors and launched this monster, first on the stand, and then in the air. We went to several conferences with her, where we received mixed reviews. In the manufacture of the first prototype, we did not go into the calculations, and the only ltx that we can provide is its dimensions. Cruise speed was calculated at 100 km / h, but somehow it did not work out with long-distance flights and recording at least some characteristics.
| folded dimensions | 650mm x 400mm x 600mm |
| scope | 1100mm |
| length | 650mm |
| propeller diameter | 11 inch |
| Curb weight | 3 Kg |
Despite the fact that the constructed model did not meet our expectations, it undoubtedly showed that such a device still has the right to life and also allowed us to do the following:
- Decide on the design of the tilt mechanism of the motors.
- Check the feasibility of such a model.
- Formulated the appearance of the model.
- Got a visual model of all mechanisms.
Frankly, we ourselves did not expect that we would be able to make a prototype, and that it would function.
After all the participants in this project began their studies at different institutes, and we abandoned this project. Gradually, the team parted somewhere. When the studies at the institute came to an end, and the graduation project was approaching, we all had the idea to return to this aircraft. No one will doubt that such a unit is multifaceted, and everyone will always find work there. Therefore, everyone took a piece that came as close as possible to his specialty ...
Prototype 2
Somehow met a beauty, a plumber, a tourist, an IT specialist and a schoolboy. And the plumber says, "The diploma is close, we have to build an airplane."
We got together again and started making the second prototype. Now we had at our disposal: a garage equipped with the latest technology, a lathe, CNC, a 3D printer, as well as experience and knowledge gained at the institute. We immediately determined the purpose of the drone, it will monitor oil pipelines. Optimal performance characteristics were selected for this task (this is another story). We calculated and drew all the units and assemblies. We calculated the rescue system and sewed a parachute. Developed a system for opening and folding wings. We made a prototype with the following LTX:
| Specifications | ||
| Mode | airplane | helicopter |
| Flight duration | up to 2.5 hours | up to 20 minutes |
| Maximum route length | 100 km | 10 km |
| Flight speed | 70-150 km / h | 0-50 km / h |
| Maximum takeoff weight | 20 kg | |
| Max. payload mass | 2 Kg | |
| dimensions | Wingspan 3200mm,
length 1600mm |
1500mm x 900mm x 1600mm |
| GMaximum flight altitude | 2500 m | 1200 m |
| Engine | electric | |
| Take-off landing | emergency parachute landing system | Vertically in automatic mode using a docking station |
| Take-off / landing time | - | 5 minutes |
| Flight characteristics | ||
| Mode | airplane | helicopter |
| Cruising speed | 100 km / h | 37 km / h |
| Rate of climb | 1.3 m / s | 2.5 m / s |
| Flight speed | 70-150 km / h | 0-50 km / h |
| The speed required for transformation | 45 km / h | - |
| Stall speed | 42 km / h (1.5kg payload) | - |
| Aerodynamic quality | 11.6 | 0 |





With the prototype built, we took part in MAKS-2019, took part in the competition from Russian Helicopters and continue to work on its modifications in our free time.
conclusions
Going your own way is always incredibly difficult. We are constantly told that this is, of course, great, but it will not work and will never fly, or we will not have enough desire to bring it to a functional state. However, we are glad to hear constructive criticism.
We are still “burning” with the desire to see our plans in the air, and we are making every possible effort to do so.
PS
In this project, when setting goals and objectives, I am guided by the requirements and conditions for UAVs in monitoring tasks, the application of all ideas of approaches and prototypes created in other industries can be considered only after reaching the goals that are set now. I consider this approach rational in the circumstances with limited material, labor and time resources. I used this kind of judgment quite often in the process of working on this project, because I look forward to seeing what I am doing in action.